

本编文章概念相关参考: www.cnblogs.com/gcczhongdua…
1, 缩放
resize(src, dsize, dst=None, fx=None, fy=None, interpolation=None)
| 参数 | 含义 |
|---|---|
| src | 输入图像 |
| dsize | 输出图像的尺寸 |
| dst | |
| fx | x轴方向的缩放因子 |
| fy | y轴方向的缩放因子 |
| interpolation | 插值方法 |
interpolation
| 取值 | 含义 |
|---|---|
| INTER_AREA | 基于局部像素的重采样 (缩放推荐) |
| INTER_BITS | |
| INTER_BITS2 | |
| INTER_CUBIC | 基于4x4像素邻域的3次插值法 (放大推荐) |
| INTER_LANCZOS4 | 基于8x8像素邻域的Lanczos插值 |
| INTER_LINEAR | (放大推荐) |
| INTER_MAX | |
| INTER_NEAREST | 双线性插值法 (默认) |
| INTER_TAB_SIZE | |
| INTER_TAB_SIZE2 |
# coding:utf-8
import cv2
import numpy as np
def show(img):
# cv2.namedWindow('aa', cv2.WINDOW_NORMAL)
cv2.imshow('aa', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
img = cv2.imread('./001_720x1080.jpg', cv2.IMREAD_UNCHANGED)
height, width = img.shape[:2]
out = cv2.resize(img,dsize=(width*2, height*2), fx=0.5, fy=0.5, interpolation=cv2.INTER_LINEAR)
show(out)
pass
2, 平移
warpAffine(src, M, dsize, dst=None, flags=None, borderMode=None, borderValue=None)
| 参数 | 含义 |
|---|---|
| src | 输入图像 |
| M | 变换矩阵 |
| dsize | 输入图像的尺寸 |
| dst | |
| flags | 插值方法 |
| borderMode | 空白点的插值模式? (None为黑) |
| borderValue |
flags
| 取值 | 含义 |
|---|---|
| WARP_FILL_OUTLIERS = 8 | 填充所有输出图像的象素。如果部分象素落在输入图像的边界外,那么它们的值设定为 fillval. |
| WARP_INVERSE_MAP = 16 | 指定 map_matrix 是输出图像到输入图像的反变换,因此可以直接用来做象素插值。否则, 函数从 map_matrix 得到反变换。 |
构建移动矩阵
沿(x, y)轴方向分别移动了 tx, ty的距离
M =\begin{bmatrix}
1 & 0 & t_x \\
0 & 1 & t_y
\end{bmatrix}
# coding:utf-8
import cv2
import numpy as np
def show(img):
# cv2.namedWindow('aa', cv2.WINDOW_NORMAL)
cv2.imshow('aa', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
img = cv2.imread('./001_720x1080.jpg', cv2.IMREAD_UNCHANGED)
M = np.array([[1,0,100],[0,1,50]],np.float32)
height, width = img.shape[:2]
out = cv2.warpAffine(img, M, (width, height))
show(out)
3, 旋转
getRotationMatrix2D(center, angle, scale)
获取旋转的矩阵
| 参数 | 含义 |
|---|---|
| center | 旋转中心点 |
| angle | 旋转角度 (顺时针角度为负) |
| scale | 缩放比例(不缩放为1) |
构建旋转矩阵, 旋转矩阵略有点复杂, opencv为了简化构建过程, 提供了函数 cv2.getRotationMatrix2D。
在不缩放的情况下, 将图像围绕图片中心点顺时针旋转45° (顺时针角度为负)
# coding:utf-8
import cv2
import numpy as np
def show(img):
# cv2.namedWindow('aa', cv2.WINDOW_NORMAL)
cv2.imshow('aa', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
img = cv2.imread('./001_720x1080.jpg', cv2.IMREAD_UNCHANGED)
height, width = img.shape[:2]
M = cv2.getRotationMatrix2D((width/2, height/2), -45, 1)
out = cv2.warpAffine(img, M, (width, height))
show(out)
4, 仿射变换
getAffineTransform(src, dst)
用于计算出放射变换的矩阵
| 参数 | 含义 |
|---|---|
| src | 原图上的三个点 |
| dst | 转换后的三个点 |
在仿射变换中虽原图中所有的平行线在结果图像中同样平行
# coding:utf-8
import cv2
import numpy as np
def show(img):
# cv2.namedWindow('aa', cv2.WINDOW_NORMAL)
cv2.imshow('aa', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
img = cv2.imread('./001_720x1080.jpg', cv2.IMREAD_UNCHANGED)
height, width = img.shape[:2]
pts1 = np.float32([[50, 50], [200, 50], [50, 200]])
pts2 = np.float32([[10, 100], [200, 50], [100, 250]])
M = cv2.getAffineTransform(pts1, pts2)
out = cv2.warpAffine(img, M, (width, height))
show(out)
5, 透视变换
getPerspectiveTransform(src, dst)
用于计算出透视变换的矩阵
| 参数 | 含义 |
|---|---|
| src | 原图上的四个点 |
| dst | 转换后的四个点 |
warpPerspective(src, M, dsize, dst=None, flags=None, borderMode=None, borderValue=None)
透视变换
| 参数 | 含义 |
|---|---|
| src | 输入图像 |
| M | 变换矩阵 |
| dsize | 输入图像的尺寸 |
| dst | |
| flags | 插值方法 |
| borderMode | 空白点的插值模式? (None为黑) |
| borderValue |
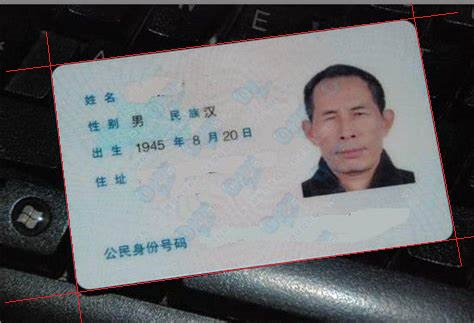
比如我们拍摄了一张身份证(网络上的图), 我们想要把他变正
# coding:utf-8
import cv2
import numpy as np
def show(img):
# cv2.namedWindow('aa', cv2.WINDOW_NORMAL)
cv2.imshow('aa', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
# 一次从(左上,左下,右下,右上) 取点
img = cv2.imread('./sfz.jpg', cv2.IMREAD_UNCHANGED)
height, width = img.shape[:2]
print("%s, %s" % (width, height))
pts1 = np.float32([[50, 65], [78, 292], [457, 238], [414, 17]])
pts2 = np.float32([[0,0], [0, 540], [856, 540], [856, 0]])
M = cv2.getPerspectiveTransform(pts1, pts2)
out = cv2.warpPerspective(img, M, (856, 540))
show(out)
