

线程概念
每个线程都包括线程ID、一组寄存器值、栈、调度优先级、策略、信号屏蔽字、errno变量、线程私有数据。使用_POSIX_THREADS来测试是否支持这个功能,使用_SC_THREADS运行时确定,都需要添加#include <pthread.h>,对于pthread库的函数成功返回0,错误返回错误编号。
线程标识
使用thread_t来标识一个线程,在不同系统中实现不一样,需要使用函数来比较。
int pthread_equal(pthread_t t1, pthread_t t2);
// 相等返回非0值
获取自身线程pthread_t
pthread_t pthread_self(void);
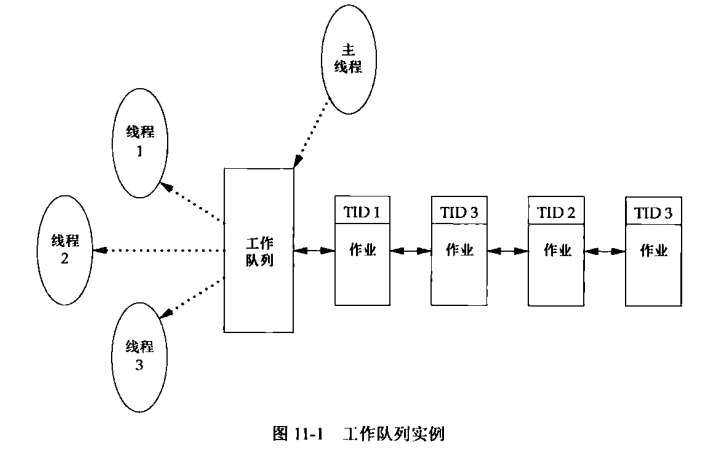
通过线程pthread_t来分配任务如图所示:
创建线程
int pthread_create(pthread_t *restrict tidp,
cosnt pthread_attr_t *restrict attr,
void *(start_rtn)(void *), void *restrict arg);
// 失败时返回错误码
attr用于定制线程的属性,为NULL时是默认属性。新创建的线程从start_rtn开始运行,将参数放到结构体中,通过void *restrict arg传递。
例子:获取线程id
#include "../include/apue.h"
#include <pthread.h>
pthread_t ntid;
void printids(const char *s)
{
pid_t pid;
pthread_t tid;
pid = getpid();
tid = pthread_self();
printf("%s pid:%lu, tid:%lu\n", s, pid, tid);
}
void *thread_func(void * arg)
{
printids("new~~~");
sleep(1);
return (void*)0;
}
int main(void) {
int err;
err = pthread_create(&ntid, NULL, thread_func, NULL); // 第二个是pthread线程参数, 第四个是函数参数
if (err != 0) {
err_exit(err, "can't create thread");
}
printids("main~~~");
// sleep(1);
exit(0);
}
如果新线程睡眠1s,然后主线程退出就不会输出新线程了。如果主线程睡眠1s,则两个线程的进程号相同。在Linux里输出如下:
main~~~ pid:8081, tid:139790962181888
new~~~ pid:8081, tid:139790953903872
线程终止
在任意线程中调用exit、_Exit、_exit都会将整个进程终止。线程终止的方法有三种:
- 从线程启动函数中返回
- 线程被同一进程中的其他线程取消
- 线程调用
pthread_exit
void pthread_exit(void * rval_ptr);
// rval_ptr指向返回值
也就是把需要返回的状态传进去,用于和等待的线程通信。可以使用pthread_join来等待指定线程完成
#include <pthread.h>
int pthread_join(pthread_t thread, void **rval_ptr);
如果被等待的线程返回,rval_ptr包含返回码,如果线程被取消,rval_ptr指定内存单元设置为PTHREAD_CANCELED。
例子:获取已终止线程退出码
#include "../include/apue.h"
#include <pthread.h>
void printids(const char *s)
{
pid_t pid;
pthread_t tid;
pid = getpid();
tid = pthread_self();
printf("%s pid:%lu, tid:%lu\n", s, (long unsigned)pid, (long unsigned)tid);
}
void *return_thread(void * arg)
{
printids("thread returning~~~");
return (void*)0;
}
void *exit_thread(void * arg)
{
printids("thread exiting~~~");
pthread_exit((void*) 2); // 参数可以返回结构体,但是这个结构体必须返回后还能使用(不是在栈上分配)
}
int main(void) {
int err;
pthread_t tid1, tid2;
void * rVal;
err = pthread_create(&tid1, NULL, return_thread, NULL); // 第二个是pthread线程参数, 第四个是函数参数
if (err != 0) {
err_exit(err, "can't create thread");
}
err = pthread_create(&tid2, NULL, exit_thread, NULL); // 第二个是pthread线程参数, 第四个是函数参数
if (err != 0) {
err_exit(err, "can't create thread");
}
pthread_join(tid1, &rVal);
printf("return_thread return:%ld\n", (long)rVal);
pthread_join(tid2, &rVal);
printf("exit_thread return:%ld\n", (long)rVal);
printids("main~~~");
// sleep(1);
exit(0);
}
程序输出结果如下:
thread returning~~~ pid:5832, tid:139867556669184
thread exiting~~~ pid:5832, tid:139867548276480
return_thread return:0
exit_thread return:2
main~~~ pid:5832, tid:139867564947200
取消其他线程
int pthread_cancel(pthread_t tid);
pthrea_cancel不等待线程终止,而是提出请求。
线程清理函数
线程安排自己的退出函数,多个清理函数会注册到栈中,按找栈里顺序执行。
void pthread_cleanup_push(void (*rtn)(void *), void *arg);
void pthread_cleanup_pop(int execute);
触发时机:
- 调用
pthread_exit时 - 响应取消请求时
- 使用非零execute参数调用
pthread_cleanup_pop,使用pthread_cleanup_pop(0)不会调用清理函数,只是删除清理函数。
例子:线程清理
输出:
thread 1 start up
thread 2 start up
thread1 return:1
clean up in thread2 second handler
clean up in thread2 first handler
thread2 return:2
main~~~ pid:10122, tid:140514088802048
只有第二个线程的清理函数被调用,这是因为系统正常终止是不会调用清理函数,即return结束
线程与进程对比
| 进程原语 | 线程原语 | 描述 |
|---|---|---|
| fork | pthread_create | 创建新的控制流 |
| exit | pthread_exit | 从现有控制流退出 |
| waitpid | pthread_join | 从控制流中得到退出状态 |
| atexit | pthread_cleanup_push | 注册在退出时调用的函数 |
| getpid | pthread_self | 获取控制流的ID |
| abort | pthread_cancel | 请求控制流的非正常退出 |
分离线程
int pthread_detach(pthread_t tid);
线程同步
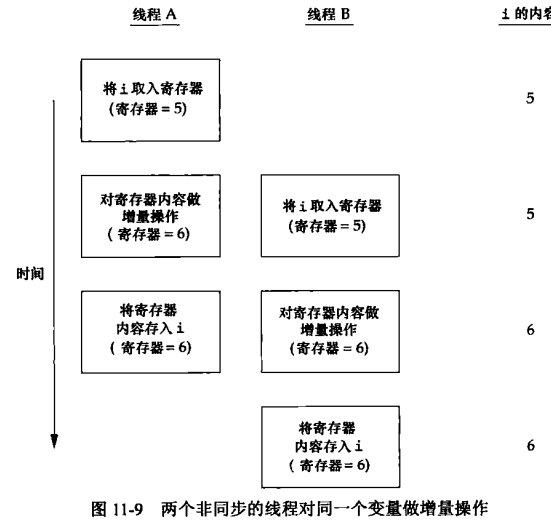
当线程B在线程A的读写间隔中读取数据就会出现不一致的值:
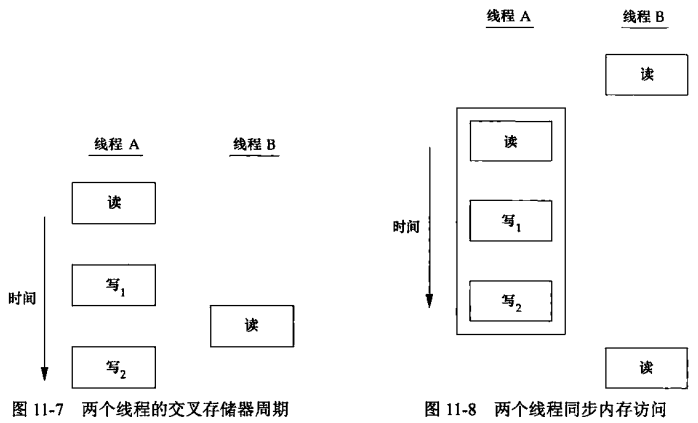
在存储操作需要多个总线周期时:
互斥变量
互斥变量本质是一把锁。对互斥量加锁后,任何试图再次对互斥量加锁的线程都会被阻塞。释放互斥量后,其他阻塞的线程变为可运行状态,第一个变为可运行状态的线程对互斥量加锁,其他变量依然变为阻塞。
互斥变量使用pthrea_mutex_t数据表示,使用前必须初始化,可以设置为pthread_mutex_t t = PTHREAD_MUTEX_INITIALIZER;用于静态初始化互斥量。
int pthread_mutex_init(pthread_mutex_t *restrict mutex,
const pthread_mutexattr_t *restrict attr);// 使用函数初始化
int pthread_mutex_destroy(pthread_mutex_t *mutex); // 使用malloc动态生成的,需要desotry函数销毁
加锁与解锁操作:
int pthread_mutex_lock(pthread_muex_t *mutex);
int pthread_mutex_trylock(pthread_muex_t *mutex); // 线程不希望被阻塞,就使用trylock,成功返回0, 失败返回EBUSY
int pthread_mutex_unlock(pthread_muex_t *mutex);
例子:互斥锁
#include "../include/apue.h"
#include <pthread.h>
struct foo {
int f_count;
pthread_mutex_t f_lock;
int f_id;
};
struct foo * foo_alloc(int id) {
struct foo *fp;
if ((fp=malloc(sizeof(struct foo))) != NULL) {
fp->f_count = 1;
fp->f_id = id;
if (pthread_mutex_init(&fp->f_lock, NULL) != 0) {
free(fp);
return (NULL);
}
}
return fp;
}
void foo_hold(struct foo *fp) {
pthread_mutex_lock(&fp->f_lock);
fp->f_count++;
pthread_mutex_unlock(&fp->f_lock);
}
void foo_release(struct foo *fp) {
pthread_mutex_lock(&fp->f_lock);
if (--fp->f_count == 0) {
pthread_mutex_unlock(&fp->f_lock);
pthread_mutex_destroy(&fp->f_lock);
free(fp);
} else {
printf("id:%d count:%d\n", fp->f_id, fp->f_count);
pthread_mutex_unlock(&fp->f_lock);
}
}
void * thread(void* arg) {
struct foo* f = (struct foo*)arg;
foo_hold(f);
}
int main(int argc, char const *argv[])
{
pthread_t tid;
struct foo* f = foo_alloc(12);
pthread_create(&tid, NULL, thread, (void*)f);
pthread_create(&tid, NULL, thread, (void*)f);
pthread_join(tid, NULL);
foo_release(f);
foo_release(f);
return 0;
}
可以看到结果中第一次释放foo时count为2,每次运行都是。
id:12 count:2
id:12 count:1
避免死锁
当线程对同一互斥量加锁两次时就会死锁。通过仔细控制互斥量加锁顺序来避免死锁发生。另一种方法: 如果已经占有某些锁,则使用pthread_mutex_trylock,如果成功则继续,如果失败则释放锁,做好清理工作,等待一段时间后再试试。
当程序师徒获取一个已加锁的互斥量时,pthread_mutex_timedlock互斥量原语绑定线程阻塞的时间。到达超时时间后pthread_mutex_timedlock不会对互斥量加锁而是返回错误码ETIMEDOUT
#include <pthread.h>
#include <time.h>
int pthread_mutex_timedlock(pthread_mutex_t *restrict mutex, const struct timespec *restrict tsptr);
#include <time.h>中的timespec使用秒和纳秒描述时间。
struct timespec
{
__time_t tv_sec; /* Seconds. */
__syscall_slong_t tv_nsec; /* Nanoseconds. */
};
#include <time.h>中的tm表示年月日星期等。
struct tm
{
int tm_sec; /* Seconds. [0-60] (1 leap second) */
int tm_min; /* Minutes. [0-59] */
int tm_hour; /* Hours. [0-23] */
int tm_mday; /* Day. [1-31] */
int tm_mon; /* Month. [0-11] */
int tm_year; /* Year - 1900. */
int tm_wday; /* Day of week. [0-6] */
int tm_yday; /* Days in year.[0-365] */
int tm_isdst; /* DST. [-1/0/1]*/
}
例子:pthread_mutex_timedlock阻塞时间
#include "../include/apue.h"
#include <pthread.h>
void printTime() {
char buf[64];
struct timespec tout;
struct tm* tmp;
clock_gettime(CLOCK_REALTIME, &tout);
tmp = localtime(&tout.tv_sec);
strftime(buf, sizeof(buf), "%r", tmp);
printf("current time is %s\n", buf);
}
int main(int argc, char const *argv[])
{
int err;
struct timespec tout;
struct tm *tmp;
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
printTime();
pthread_mutex_lock(&lock);
printf("mutex is lock\n");
clock_gettime(CLOCK_REALTIME, &tout);
tout.tv_sec += 10;
pthread_mutex_timedlock(&lock, &tout);
printTime();
return 0;
}
因为已经获得了lock的锁,再次用pthread_mutex_lock锁住会导致死锁,使用pthread_mutex_timedlock只会阻塞指定时间。
输出结果如下,只阻塞了10秒
current time is 06:55:12 PM
mutex is lock
current time is 06:55:22 PM
读写锁(共享互斥锁)
读写锁有三种状态:读模式下加锁状态、写模式下加锁状态、不加锁状态。一次只有一个线程占有写模式的读写锁,但是多个线程可以同时占有读模式的读写锁
- 当写锁已加锁时,试图对其加锁会使线程阻塞
- 在读锁已加锁时,试图对其加读锁的线程获得访问权,若对其加写锁会使线程阻塞,直到所以线程释放读锁
- 读写锁适用于对数据结构读取次数远大于写入的情况
读写锁必须在使用前初始化、使用后释放内存前销毁
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,
const pthread_rwlockattr_t *restrict attr);
// 初始化函数,如果读写锁默认属性则传入null给attr
int pthread_rwlock_destroy(pthread_rwlock_t * rwlock);
// 在free前调用
pthread_rwlock_t lock = PTHREAD_RWLOCK_INITIALIZER; // 静态初始化(Signle UNIX Specification)
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock); //读加锁
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock); // 写加锁
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock); // 解锁
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock); // 条件版本(Signle UNIX Specification)
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock); // 条件版本(Signle UNIX Specification)
// 获得锁是返回0,否则返回错误EBUSY
例子:读写锁(共享互斥锁)
作业队列,使用单个读写锁保护队列,插入、删除会尝试给队列加写锁,查找队列时会给队列加读锁。
#include "../include/apue.h"
#include <pthread.h>
struct job {
struct job *j_next;
struct job *j_prev;
pthread_t j_id; // 哪一个线程处理这个任务
};
struct queue {
struct job *q_head;
struct job *q_tail;
pthread_rwlock_t q_lock;
};
int queue_init(struct queue *qp) {
int err;
qp->q_head = NULL;
qp->q_tail = NULL;
err = pthread_rwlock_init(&qp->q_lock);
if (err != 0) {
return err;
}
return 0;
}
// 从队列后面插入job
void job_insert_tail(struct queue *qp, struct job *jp) {
pthread_rwlock_wrlock(&qp->q_lock);
jp->j_next = NULL;
jp->j_prev = qp->q_tail;
if (qp->q_tail != NULL) {
qp->q_tail->j_next = jp;
} else {
qp->q_head = jp; // 链表为空
}
qp->q_tail = jp;
pthread_rwlock_unlock(&qp->q_lock);
}
// 从队列前面插入job
void job_insert_front(struct queue *qp, struct job *jp) {
pthread_rwlock_wrlock(&qp->q_lock);
jp->j_next = qp->q_head;
jp->j_prev = NULL;
if (qp->q_head != NULL) {
qp->q_head->j_prev = jp;
} else {
qp->q_tail = jp; // 链表为空
}
qp->q_head = jp;
pthread_rwlock_unlock(&qp->q_lock);
}
// 从队列中删除job
void job_remove(struct queue *qp, struct job *jp) {
pthread_rwlock_wrlock(&qp->q_lock);
if (jp == qp->q_head) {
qp->q_head = jp->j_next;
if (jp == qp->q_tail) {
qp->q_tail = NULL;
} else {
jp->j_next->j_prev = jp->j_prev;
}
} else if (jp == qp->q_tail) {
jp->j_prev->j_next = jp->j_next;
qp->q_tail = jp->j_prev;
} else {
jp->j_prev->j_next = jp->j_next;
jp->j_next->j_prev = jp->j_prev;
}
pthread_rwlock_unlock(&qp->q_lock);
}
// 通过线程id查找某个任务
struct job* job_find(struct queue *qp, pthread_t id) {
struct job* jp;
if (pthread_rwlock_rdlock(&qp->q_lock) != 0) {
return NULL;
}
for (jp = qp->q_head; jp != NULL; jp = jp->j_next) {
if (pthread_equal(jp->j_id, id)) {
printf("Find you!\n");
break;
}
}
pthread_rwlock_unlock(&qp->q_lock);
return jp;
}
每次只能有一个写锁,所以对于job结构体不需要对它加锁。
带有超时的读写锁(Single UNIX Specification)
int pthread_rwlock_timedrdlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict tsptr);
int pthread_rwlock_timedwrlock(pthread_rwlock_t *restrict rwlock,
const struct timespec *restrict tsptr);
超时会返回ETIMEDOUT
条件变量
条件变量有互斥量保护,线程在改变条件状态之前首先锁住互斥量,锁住后计算条件。
// 1.动态初始化
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);`
// 2.静态初始化
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;`
// 销毁方式:
int pthread_cond_destroy(pthread_cond_t *cond);
// 等待条件变量变为真
int pthread_cond_wait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex);
int pthread_cond_timedwait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex,
const struct timespec *restrict tsptr);
使用互斥量对条件进行保护,调用者把锁住的互斥量传给函数,函数然后自动把调用线程放到等待条件的线程列表中,然后对互斥量解锁。
等待时间使用的是绝对时间,不是之前的时间差而是将未来时间传入,使用clock_gettime获得timespec表示的当前时间,也可以通过gettimeofday获得timeval结构表示的当前时间,再转换为timespec,函数如下所示:
#include <sys/time.h>
#include <stdlib.h>
// 以分钟作为时间间隔
void maketimeout(struct timespec *tsp, long minutes) {
struct timeval now;
gettimeofday(&now, NULL);
tsp->tv_sec = now.tv_sec;
tsp->tv_nsec = now.tv_usec * 1000;
tsp->tv_sec += minutes * 60;
}
从pthread_cond_wait或pthread_cond_timedwait调用成功返回时,线程需要重新计算条件。pthread_cond_signal能唤醒至少一个睡眠线程,pthread_cond_broadcast能唤醒所以等待而睡眠的线程。
int pthread_cond_signal(pthread_cond_t *cnd);
int pthread_cond_broadcast(pthread_cond_t *cond);
必须在改变条件状态之后再给线程发送信号
例子:使用条件变量和互斥量进行线程同步
#include "../include/apue.h"
#include <pthread.h>
#define WORKS_NUMS 10
struct msg
{
struct msg *m_next;
char message[64];
};
struct msg *workq;
pthread_cond_t qready = PTHREAD_COND_INITIALIZER;
pthread_mutex_t qlock = PTHREAD_MUTEX_INITIALIZER;
void process_msg(char* name)
{
struct msg *mp;
pthread_mutex_lock(&qlock);
while (workq == NULL)
pthread_cond_wait(&qready, &qlock);
// 将锁住的互斥量传入,pthread_cond_wait会将线程放入等待队列中,然后解锁qlock,
// 此时阻塞在pthread_cond_wait,当被pthread_cond_signal或pthread_cond_broadcast
// 唤醒后此时qlock会锁住,如果workq==NULL,就会再次等待
mp = workq;
workq = workq->m_next;
pthread_mutex_unlock(&qlock);
printf("[process-%s]:%s\n", name, mp->message);
}
void enqueue_msg(struct msg *mp)
{
pthread_mutex_lock(&qlock); // 条件workq是由互斥量mutex保护
mp->m_next = workq; // 修改条件这个操作需要保持一致
workq = mp;
pthread_mutex_unlock(&qlock);
pthread_cond_signal(&qready); // 修改条件后才发送信号
}
void *worker(void *arg)
{
printf("worker %s create!\n", (char *)arg);
process_msg((char*)arg);
}
void *sender(void *arg)
{
printf("sender create!\n");
for (int i = 0; i < WORKS_NUMS; i++)
{
struct msg *m = (struct msg *)malloc(sizeof(struct msg));
sprintf(m->message, "msg-%d", i);
enqueue_msg(m);
sleep(1); // 发送后等待1s,让worker处于等待状态
}
return 0;
}
int main(int argc, char const *argv[])
{
pthread_t send;
pthread_t works[WORKS_NUMS];
pthread_create(&send, NULL, sender, NULL);
// sleep(1);
for(int i= 0; i < WORKS_NUMS; i++) {
char *name = (char*)malloc(10);
sprintf(name, "%d", i);
pthread_create(&works[i], NULL, worker, (void *)name);
}
pthread_join(send, NULL);
for(int i= 0; i < WORKS_NUMS; i++) {
pthread_join(works[i], NULL);
}
return 0;
}
输出:
sender create!
worker 0 create!
[worker-0]:msg-0
worker 3 create!
worker 2 create!
worker 4 create!
worker 1 create!
worker 5 create!
worker 6 create!
worker 7 create!
worker 8 create!
worker 9 create!
[worker-3]:msg-1
[worker-2]:msg-2
[worker-4]:msg-3
[worker-1]:msg-4
[worker-5]:msg-5
[worker-6]:msg-6
[worker-7]:msg-7
[worker-8]:msg-8
[worker-9]:msg-9
因为pthread_cond_wait是在while循环中,如果不满足条件会继续进入循环。
