

作者:bool周 原文链接:我所理解的 iOS 并发编程
无论在哪个平台,并发编程都是一个让人头疼的问题。庆幸的是,相对于服务端,客户端的并发编程简单了许多。这篇文章主要讲述一些基于 iOS 平台的一些并发编程相关东西,我写博客习惯于先介绍原理,后介绍用法,毕竟对于 API 的使用,官网有更好的文档。
一些原理性的东西
为了便于理解,这里先解释一些相关概念。如果你对这些概念已经很熟悉,可以直接跳过。
1.进程
从操作系统定义上来说,进程就是系统进行资源分配和调度的基本单位,系统创建一个线程后,会为其分配对应的资源。在 iOS 系统中,进程可以理解为就是一个 App。iOS 并没有提供可以创建进程的 API,即使你调用 fork() 函数,也不能创建新的进程。所以,本文所说的并发编程,都是针对线程来说的。
2.线程
线程是程序执行流的最小单元。一般情况下,一个进程会有多个线程,或者至少有一个线程。一个线程有创建、就绪、运行、阻塞和死亡五种状态。线程可以共享进程的资源,所有的问题也是因为共享资源引起的。
3.并发
操作系统引入线程的概念,是为了使过个 CPU 更好的协调运行,充分发挥他们的并行处理能力。例如在 iOS 系统中,你可以在主线程中进行 UI 操作,然后另启一些线程来处理与 UI 操作无关的事情,两件事情并行处理,速度比较快。这就是并发的大致概念。
4.时间片
按照 wiki 上面解释:是分时操作系统分配给每个正在运行的进程微观上的一段CPU时间(在抢占内核中是:从进程开始运行直到被抢占的时间)。线程可以被认为是 ”微进程“,因此这个概念也可以用到线程方面。
一般操作系统使用时间片轮转算法进行调度,即每次调度时,总是选择就绪队列的队首进程,让其在CPU上运行一个系统预先设置好的时间片。一个时间片内没有完成运行的进程,返回到绪队列末尾重新排队,等待下一次调度。不同的操作系统,时间片的范围不一致,一般都是毫秒(ms)级别。
4.死锁
死锁是由于多个线程(进程)在执行过程中,因为争夺资源而造成的互相等待现象,你可以理解为卡主了。产生死锁的必要条件有四个:
- 互斥条件 : 指进程对所分配到的资源进行排它性使用,即在一段时间内某资源只由一个进程占用。如果此时还有其它进程请求资源,则请求者只能等待,直至占有资源的进程用毕释放。
- 请求和保持条件 : 指进程已经保持至少一个资源,但又提出了新的资源请求,而该资源已被其它进程占有,此时请求进程阻塞,但又对自己已获得的其它资源保持不放。
- 不可剥夺条件 : 指进程已获得的资源,在未使用完之前,不能被剥夺,只能在使用完时由自己释放。
- 环路等待条件 : 指在发生死锁时,必然存在一个进程——资源的环形链,即进程集合{P0,P1,P2,···,Pn}中的P0正在等待一个P1占用的资源;P1正在等待P2占用的资源,……,Pn正在等待已被P0占用的资源。
为了便于理解,这里举一个例子:一座桥,同一时间只允许一辆车经过(互斥)。两辆车 A,B 从桥的两端开上桥,走到桥的中间。此时 A 车不肯退(不可剥夺),又想占用 B 车所占据的道路;B 车此时也不肯退,又想占用 A 车所占据的道路(请求和保持)。此时,A 等待 B 占用的资源,B 等待 A 占用的资源(环路等待),两车僵持下去,就形成了死锁现象。
5.线程安全
当多个线程同时访问一块共享资源(例如数据库),因为时序性问题,会导致数据错乱,这就是线程不安全。例如数据库中某个整形字段的 value 为 0,此时两个线程同时对其进行写入操作,线程 A 拿到原值为 0,加一后变为 1;线程 B 并不是在 A 加完后拿的,而是和 A 同时拿的,加完后也是 1,加了两次,理想值应该为 2,但是数据库中最终值却是 1。实际开发场景可能要比这个复杂的多。
所谓的线程安全,可以理解为在多个线程操作(例如读写操作)这部分数据时,不会出现问题。
Lock
因为线程共享进程资源,在并发情况下,就会出现线程安全问题。为了解决此问题,就出现了锁这个概念。在多线程环境下,当你访问一些共享数据时,拿到访问权限,给数据加锁,在这期间其他线程不可访问,直到你操作完之后进行解锁,其他线程才可以对其进行操作。
iOS 提供了多种锁,ibireme 大神的 这篇文章 对这些锁进行了性能分析,我这里直接把图 cp 过来了:
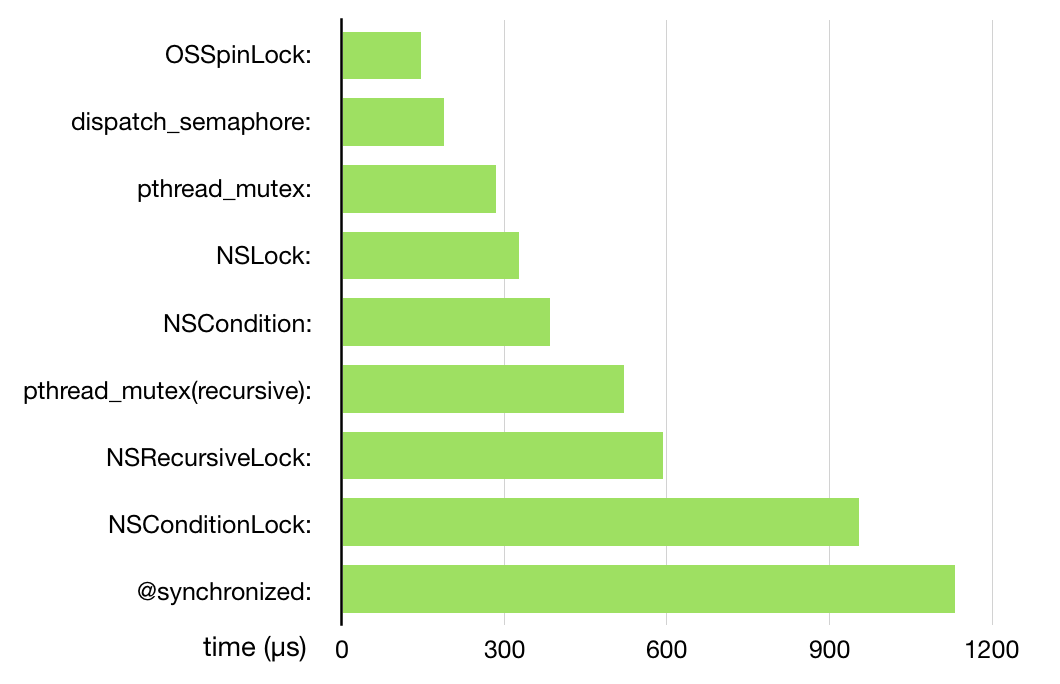
下面针对这些锁,逐一分析。
1.OSSpinLock
ibireme 大神的文章也说了,虽然这个锁性能最高,但是已经不安全了,建议不再使用,这里简单说一下。
OSSpinLock 是一种自旋锁,主要提供了加锁(OSSpinLockLock)、尝试枷锁(OSSpinLockTry)和解锁(OSSpinLockUnlock)三个方法。对一块资源进行加锁时,如果尝试加锁失败,不会进入睡眠状态,而是一直进行询问(自旋),占用 CPU资源,不适用于较长时间的任务。在自旋期间,因为占用 CPU 导致低优先级线程拿不到 CUP 资源,无法完成任务并释放锁,从而形成了优先级反转。
so,虽然性能很高,但是不要用了。而且 Apple 也已经将这个类比较为 deprecate 了。
自旋锁 & 互斥锁 两者大体类似,区别在于:自旋锁属于 busy-waiting 类型锁,尝试加锁失败,会一直处于询问状态,占用 CPU 资源,效率高;互斥锁属于 sleep-waiting 类型锁,在尝试失败之后,会被阻塞,然后进行上下文切换置于等待队列,因为有上下文切换,效率较低。 在 iOS 中 NSLock 属于互斥锁。
优先级反转 :当一个高优先级任务访问共享资源时,该资源已经被一个低优先级任务抢占,阻塞了高优先级任务;同时,该低优先级任务被一个次高优先级的任务所抢先,从而无法及时地释放该临界资源。最终使得任务优先级被倒置,发生阻塞。(引用自 wiki
关于自旋锁的原理,bestswifter 的文章 深入理解 iOS 开发中的锁 这篇文章讲得很好,我这里大部分锁的知识引用于此,建议读一下原文。
自旋锁是加不上就一直尝试,也就是一个循环,直到尝试加上锁,伪代码如下:
bool lock = false; // 一开始没有锁上,任何线程都可以申请锁
do {
while(test_and_set(&lock); // test_and_set 是一个原子操作,尝试加锁
Critical section // 临界区
lock = false; // 相当于释放锁,这样别的线程可以进入临界区
Reminder section // 不需要锁保护的代码
}
使用 :
OSSpinLock spinLock = OS_SPINLOCK_INIT;
OSSpinLockLock(&spinLock);
// 被锁住的资源
OSSpinLockUnlock(&spinLock);
2.dispatch_semaphore
dispatch_semaphore 并不属于锁,而是信号量。两者的区别如下:
- 锁是用于线程互斥操作,一个线程锁住了某个资源,其他线程都无法访问,直到整个线程解锁;信号量用于线程同步,一个线程完成了某个动作通过信号量告诉别的线程,别的线程再进行操作。
- 锁的作用域是线程之间;信号量的作用域是线程和进程之间。
- 信号量有时候可以充当锁的作用,初次之前还有其他作用。
- 如果转化为数值,锁可以认为只有 0 和 1;信号量可以大于零和小于零,有多个值。
dispatch_semaphore 使用分为三步:create、wait 和 signal。如下:
// create
dispatch_semaphore_t semaphore = dispatch_semaphore_create(1);
// thread A
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
dispatch_semaphore_wait(semaphore, DISPATCH_TIME_FOREVER);
// execute task A
NSLog(@"task A");
sleep(10);
dispatch_semaphore_signal(semaphore);
});
// thread B
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
dispatch_semaphore_wait(semaphore, DISPATCH_TIME_FOREVER);
// execute task B
NSLog(@"task B");
dispatch_semaphore_signal(semaphore);
});
执行结果:
2018-05-03 21:40:09.068586+0800 ConcurrencyTest[44084:1384262] task A
2018-05-03 21:40:19.072951+0800 ConcurrencyTest[44084:1384265] task B
thread A,B 是两个异步线程,一般情况下,各自执行自己的事件,互不干涉。但是根据 console 输出,B 是在 A 执行完了 10s 执行之后才执行的,显然受到阻塞。使用 dispatch_semaphore 大致执行过程这样:创建 semaphore 时,信号量值为 1;执行到线程 A 的 dispatch_semaphore_wait 时,信号量值减 1,变为 0;然后执行任务 A,执行完毕后 sleep 方法阻塞当前线程 10s;与此同时,线程 B 执行到了 dispatch_semaphore_wait,由于信号量此时为 0,且线程 A 中设置的为 DISPATCH_TIME_FOREVER,因此需要等到线程 A sleep 10s 之后,执行 dispatch_semaphore_signal 将信号量置为 1,线程 B 的任务才开始执行。
根据上面的描述,dispatch_semaphore 的原理大致也就了解了。GCD 源码 对这些方法定义如下:
long
dispatch_semaphore_wait(dispatch_semaphore_t dsema, dispatch_time_t timeout)
{
long value = dispatch_atomic_dec2o(dsema, dsema_value);
dispatch_atomic_acquire_barrier();
if (fastpath(value >= 0)) {
return 0;
}
return _dispatch_semaphore_wait_slow(dsema, timeout);
}
static long
_dispatch_semaphore_wait_slow(dispatch_semaphore_t dsema,
dispatch_time_t timeout)
{
long orig;
again:
// Mach semaphores appear to sometimes spuriously wake up. Therefore,
// we keep a parallel count of the number of times a Mach semaphore is
// signaled (6880961).
while ((orig = dsema->dsema_sent_ksignals)) {
if (dispatch_atomic_cmpxchg2o(dsema, dsema_sent_ksignals, orig,
orig - 1)) {
return 0;
}
}
struct timespec _timeout;
int ret;
switch (timeout) {
default:
do {
uint64_t nsec = _dispatch_timeout(timeout);
_timeout.tv_sec = (typeof(_timeout.tv_sec))(nsec / NSEC_PER_SEC);
_timeout.tv_nsec = (typeof(_timeout.tv_nsec))(nsec % NSEC_PER_SEC);
ret = slowpath(sem_timedwait(&dsema->dsema_sem, &_timeout));
} while (ret == -1 && errno == EINTR);
if (ret == -1 && errno != ETIMEDOUT) {
DISPATCH_SEMAPHORE_VERIFY_RET(ret);
break;
}
// Fall through and try to undo what the fast path did to
// dsema->dsema_value
case DISPATCH_TIME_NOW:
while ((orig = dsema->dsema_value) < 0) {
if (dispatch_atomic_cmpxchg2o(dsema, dsema_value, orig, orig + 1)) {
errno = ETIMEDOUT;
return -1;
}
}
// Another thread called semaphore_signal().
// Fall through and drain the wakeup.
case DISPATCH_TIME_FOREVER:
do {
ret = sem_wait(&dsema->dsema_sem);
} while (ret != 0);
DISPATCH_SEMAPHORE_VERIFY_RET(ret);
break;
}
goto again;
}
以上时对 wait 方法的定义,如果你不想看代码,可以直接听我说:
- 调用
dispatch_semaphore_wait方法时,如果信号量大于 0,直接返回;否则进入后续步骤。 _dispatch_semaphore_wait_slow方法根据传入timeout参数不同,使用 switch-case 处理。- 如果传入的是 DISPATCH_TIME_NOW 参数,将信号量加 1 并立即返回。
- 如果传入的是一个超时时间,调用系统的
semaphore_timedwait方法进行等待,直至超时。 - 如果传入的是 DISPATCH_TIME_FOREVER 参数,调用系统的
semaphore_wait进行等待,直到收到singal信号。
至于 dispatch_semaphore_signal 就比较简单了,源码如下:
long
dispatch_semaphore_signal(dispatch_semaphore_t dsema)
{
dispatch_atomic_release_barrier();
long value = dispatch_atomic_inc2o(dsema, dsema_value);
if (fastpath(value > 0)) {
return 0;
}
if (slowpath(value == LONG_MIN)) {
DISPATCH_CLIENT_CRASH("Unbalanced call to dispatch_semaphore_signal()");
}
return _dispatch_semaphore_signal_slow(dsema);
}
- 现将信号量加 1,大于 0 直接返回。
- 小于 0 返回
_dispatch_semaphore_signal_slow,这个方法的作用是调用内核的 semaphore_signal 函数唤醒信号量,然后返回 1。
3.pthread_mutex
Pthreads 是 POSIX Threads 的缩写。pthread_mutex 属于互斥锁,即尝试加锁失败后悔阻塞线程并睡眠,会进行上下文切换。锁的类型主要有三种:PTHREAD_MUTEX_NORMAL、PTHREAD_MUTEX_ERRORCHECK、PTHREAD_MUTEX_RECURSIVE。
- PTHREAD_MUTEX_NORMAL,普通锁,当一个线程加锁以后,其余请求锁的线程将形成一个等待队列,并在解锁后按优先级获得锁。这种锁策略保证了资源分配的公平性。
- PTHREAD_MUTEX_ERRORCHECK,检错锁,如果同一个线程请求同一个锁,则返回 EDEADLK。否则和 PTHREAD_MUTEX_NORMAL 相同。
- PTHREAD_MUTEX_RECURSIVE,递归锁,允许一个线程进行递归申请锁。
使用如下:
pthread_mutex_t mutex; // 定义锁
pthread_mutexattr_t attr; // 定义 mutexattr_t 变量
pthread_mutexattr_init(&attr); // 初始化attr为默认属性
pthread_mutexattr_settype(&attr, PTHREAD_MUTEX_NORMAL); // 设置锁的属性
pthread_mutex_init(&mutex, &attr); // 创建锁
pthread_mutex_lock(&mutex); // 申请锁
// 临界区
pthread_mutex_unlock(&mutex); // 释放锁
4.NSLock
NSLock 属于互斥锁,是 Objective-C 封装的一个对象。虽然我们不知道 Objective-C 是如何实现的,但是我们可以在 swift 源码 中找到他的实现 :
...
internal var mutex = _PthreadMutexPointer.allocate(capacity: 1)
...
open func lock() {
pthread_mutex_lock(mutex)
}
open func unlock() {
pthread_mutex_unlock(mutex)
#if os(macOS) || os(iOS)
// Wakeup any threads waiting in lock(before:)
pthread_mutex_lock(timeoutMutex)
pthread_cond_broadcast(timeoutCond)
pthread_mutex_unlock(timeoutMutex)
#endif
}
可以看出他只是将 pthread_mutex 封装了一下。只因为比 pthread_mutex 慢一些,难道是因为方法层级之间的调用,多了几次压栈操作???
常规使用:
NSLock *mutexLock = [NSLock new];
[mutexLock lock];
// 临界区
[muteLock unlock];
4.NSCondition & NSConditionLock
NSCondition 可以同时起到 lock 和条件变量的作用。同样你可以在 swift 源码 中找到他的实现 :
open class NSCondition: NSObject, NSLocking {
internal var mutex = _PthreadMutexPointer.allocate(capacity: 1)
internal var cond = _PthreadCondPointer.allocate(capacity: 1)
public override init() {
pthread_mutex_init(mutex, nil)
pthread_cond_init(cond, nil)
}
deinit {
pthread_mutex_destroy(mutex)
pthread_cond_destroy(cond)
mutex.deinitialize(count: 1)
cond.deinitialize(count: 1)
mutex.deallocate()
cond.deallocate()
}
open func lock() {
pthread_mutex_lock(mutex)
}
open func unlock() {
pthread_mutex_unlock(mutex)
}
open func wait() {
pthread_cond_wait(cond, mutex)
}
open func wait(until limit: Date) -> Bool {
guard var timeout = timeSpecFrom(date: limit) else {
return false
}
return pthread_cond_timedwait(cond, mutex, &timeout) == 0
}
open func signal() {
pthread_cond_signal(cond)
}
open func broadcast() {
pthread_cond_broadcast(cond)
}
open var name: String?
}
可以看出,它还是遵循 NSLocking 协议,lock 方法同样还是使用的 pthread_mutex,wait 和 signal 使用的是 pthread_cond_wait 和 pthread_cond_signal。
使用 NSCondition 是,先对要操作的临界区加锁,然后因为条件不满足,使用 wait 方法阻塞线程;待条件满足之后,使用 signal 方法进行通知。下面是一个 生产者-消费者的例子:
NSCondition *condition = [NSCondition new];
NSMutableArray *products = [NSMutableArray array];
// consume
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
[condition lock];
while (products.count == 0) {
[condition wait];
}
[products removeObjectAtIndex:0];
[condition unlock];
});
// product
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
[condition lock];
[products addObject:[NSObject new]];
[condition signal];
[condition unlock];
});
NSConditionLock 是通过使用 NSCondition 来实现的,遵循 NSLocking 协议,然后这是 swift 源码 (源码比较占篇幅,我这里简化一下):
open class NSConditionLock : NSObject, NSLocking {
internal var _cond = NSCondition()
...
open func lock(whenCondition condition: Int) {
let _ = lock(whenCondition: condition, before: Date.distantFuture)
}
open func `try`() -> Bool {
return lock(before: Date.distantPast)
}
open func tryLock(whenCondition condition: Int) -> Bool {
return lock(whenCondition: condition, before: Date.distantPast)
}
open func unlock(withCondition condition: Int) {
_cond.lock()
_thread = nil
_value = condition
_cond.broadcast()
_cond.unlock()
}
open func lock(before limit: Date) -> Bool {
_cond.lock()
while _thread != nil {
if !_cond.wait(until: limit) {
_cond.unlock()
return false
}
}
_thread = pthread_self()
_cond.unlock()
return true
}
open func lock(whenCondition condition: Int, before limit: Date) -> Bool {
_cond.lock()
while _thread != nil || _value != condition {
if !_cond.wait(until: limit) {
_cond.unlock()
return false
}
}
_thread = pthread_self()
_cond.unlock()
return true
}
...
}
可以看出它使用了一个 NSCondition 全局变量来实现 lock 和 unlock 方法,都是一些简单的代码逻辑,就不详细说了。
使用 NSConditionLock 注意:
- 初始化 NSConditionLock 会设置一个 condition,只有满足这个 condition 才能加锁。
-[unlockWithCondition:]并不是满足条件时解锁,而是解锁后,修改 condition 值。
typedef NS_ENUM(NSInteger, CTLockCondition) {
CTLockConditionNone = 0,
CTLockConditionPlay,
CTLockConditionShow
};
- (void)testConditionLock {
NSConditionLock *conditionLock = [[NSConditionLock alloc] initWithCondition:CTLockConditionPlay];
// thread one
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
[conditionLock lockWhenCondition:CTLockConditionNone];
NSLog(@"thread one");
sleep(2);
[conditionLock unlock];
});
// thread two
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
sleep(1);
if ([conditionLock tryLockWhenCondition:CTLockConditionPlay]) {
NSLog(@"thread two");
[conditionLock unlockWithCondition:CTLockConditionShow];
NSLog(@"thread two unlocked");
} else {
NSLog(@"thread two try lock failed");
}
});
// thread three
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
sleep(2);
if ([conditionLock tryLockWhenCondition:CTLockConditionPlay]) {
NSLog(@"thread three");
[conditionLock unlock];
NSLog(@"thread three locked success");
} else {
NSLog(@"thread three try lock failed");
}
});
}
// thread four
dispatch_async(dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_DEFAULT, 0), ^{
sleep(4);
if ([conditionLock tryLockWhenCondition:CTLockConditionShow]) {
NSLog(@"thread four");
[conditionLock unlock];
NSLog(@"thread four unlocked success");
} else {
NSLog(@"thread four try lock failed");
}
});
}
然后看输出结果 :
2018-05-05 16:34:33.801855+0800 ConcurrencyTest[97128:3100768] thread two
2018-05-05 16:34:33.802312+0800 ConcurrencyTest[97128:3100768] thread two unlocked
2018-05-05 16:34:34.804384+0800 ConcurrencyTest[97128:3100776] thread three try lock failed
2018-05-05 16:34:35.806634+0800 ConcurrencyTest[97128:3100778] thread four
2018-05-05 16:34:35.806883+0800 ConcurrencyTest[97128:3100778] thread four unlocked success
可以看出,thread one 因为条件和初始化不符,加锁失败,未输出 log; thread two 条件相符,解锁成功,并修改加锁条件;thread three 使用原来的加锁条件,显然无法加锁,尝试加锁失败; thread four 使用修改后的条件,加锁成功。
5. NSRecursiveLock
NSRecursiveLock 属于递归锁。然后这是 swift 源码,只贴一下关键部分:
open class NSRecursiveLock: NSObject, NSLocking {
...
public override init() {
super.init()
#if CYGWIN
var attrib : pthread_mutexattr_t? = nil
#else
var attrib = pthread_mutexattr_t()
#endif
withUnsafeMutablePointer(to: &attrib) { attrs in
pthread_mutexattr_settype(attrs, Int32(PTHREAD_MUTEX_RECURSIVE))
pthread_mutex_init(mutex, attrs)
}
}
...
}
它是使用 PTHREAD_MUTEX_RECURSIVE 类型的 pthread_mutex_t 初始化的。递归所可以在一个线程中重复调用,然后底层会记录加锁和解锁次数,当二者次数相同时,才能正确解锁,释放这块临界区。
使用例子:
- (void)testRecursiveLock {
NSRecursiveLock *recursiveLock = [NSRecursiveLock new];
int (^__block fibBlock)(int) = ^(int num) {
[recursiveLock lock];
if (num < 0) {
[recursiveLock unlock];
return 0;
}
if (num == 1 || num == 2) {
[recursiveLock unlock];
return num;
}
int newValue = fibBlock(num - 1) + fibBlock(num - 2);
[recursiveLock unlock];
return newValue;
};
int value = fibBlock(10);
NSLog(@"value is %d", value);
}
6. @synchronized
@synchronized 是牺牲性能来换取语法上的简洁。如果你想深入了解,建议你去读 这篇文章。这里说一下他的大概原理:
@synchronized 的加锁过程,大概是这个样子:
@try {
objc_sync_enter(obj); // lock
// 临界区
} @finally {
objc_sync_exit(obj); // unlock
}
@synchronized 的存储结构,是使用哈希表来实现的。当你传入一个对象后,会为这个对象分配一个锁。锁和对象打包成一个对象,然后和一个锁在进行二次打包成一个对象,可以理解为 value;通过一个算法,根据对象的地址得到一个值,作为 key。然后以 key-value 的形式写入哈希表。结构大概是这个样子:
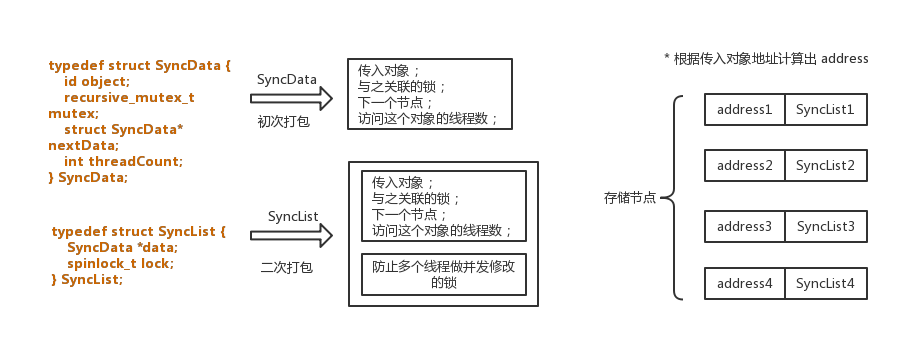
存储的时候,是以哈希表结构存储,不是我上面画的顺序存储,上面只是一个节点而已。
@synchronized 的使用就很简单了 :
NSMutableArray *elementArray = [NSMutableArray array];
@synchronized(elementArray) {
[elementArray addObject:[NSObject new]];
}
Pthreads
前面也说了,pthreads 是 POSIX Threads 的缩写。这个东西一般我们用不到,这里简单介绍一下。Pthreads 是POSIX的线程标准,定义了创建和操纵线程的一套API。实现POSIX 线程标准的库常被称作Pthreads,一般用于Unix-like POSIX 系统,如Linux、 Solaris。
NSThread
NSThread 是对内核 mach kernel 中的 mach thread 的封装,一个 NSThread 对象就是一个线程。使用频率比较低,除了 API 的使用,没什么可讲的。如果你已经熟悉这些 API,可以跳过这一节了。
1.初始化线程执行一个 task
使用初始化方法初始化一个 NSTherad 对象,调用 -[cancel]、-[start、-[main] 方法对线程进行操作,一般线程执行完即销毁,或者因为某种异常退出。
/** 使用 target 对象的中的方法作为执行主体,可以通过 argument 传递一些参数。
- (instancetype)initWithTarget:(id)target selector:(SEL)selector object:(nullable id)argument;
/** 使用 block 对象作为执行主体 */
- (instancetype)initWithBlock:(void (^)(void))block;
/** 类方法,上面对象方法需要调用 -[start] 方法启动线程,下面两个方法不需要手动启动 */
+ (void)detachNewThreadWithBlock:(void (^)(void))block;
+ (void)detachNewThreadSelector:(SEL)selector toTarget:(id)target withObject:(nullable id)argument;
2.在主线程执行一个 task
/** 说一下最后一个参数,这里你至少指定一个 mode 执行 selector,如果你传 nil 或者空数组,selector 不会执行,虽然方法定义写了 nullable */
- (void)performSelectorOnMainThread:(SEL)aSelector withObject:(nullable id)arg waitUntilDone:(BOOL)wait modes:(nullable NSArray<NSString *> *)array;
- (void)performSelectorOnMainThread:(SEL)aSelector withObject:(nullable id)arg waitUntilDone:(BOOL)wait;
3.在其他线程执行一个 task
/** modes 参数同上一个 */
- (void)performSelector:(SEL)aSelector onThread:(NSThread *)thr withObject:(nullable id)arg waitUntilDone:(BOOL)wait modes:(nullable NSArray<NSString *> *)array;
- (void)performSelector:(SEL)aSelector onThread:(NSThread *)thr withObject:(nullable id)arg waitUntilDone:(BOOL)wait
4.在后台线程执行一个 task
- (void)performSelectorInBackground:(SEL)aSelector withObject:(nullable id)arg;
5.获取当前线程
@property (class, readonly, strong) NSThread *currentThread;
使用线程相关方法时,记得设置好 name,方便后面调试。同时也设置好优先级等其他参数。
performSelector: 系列方法已经不太安全,慎用。
Grand Central Dispatch (GCD)
GCD 是基于 C 实现的一套 API,而且是开源的,如果有兴趣,可以在 这里 down 一份源码研究一下。GCD 是由系统帮我们处理多线程调度,很是方便,也是使用频率最高的。这一章节主要讲解一下 GCD 的原理和使用。
在讲解之前,我们先有个概览,看一下 GCD 为我们提供了那些东西:
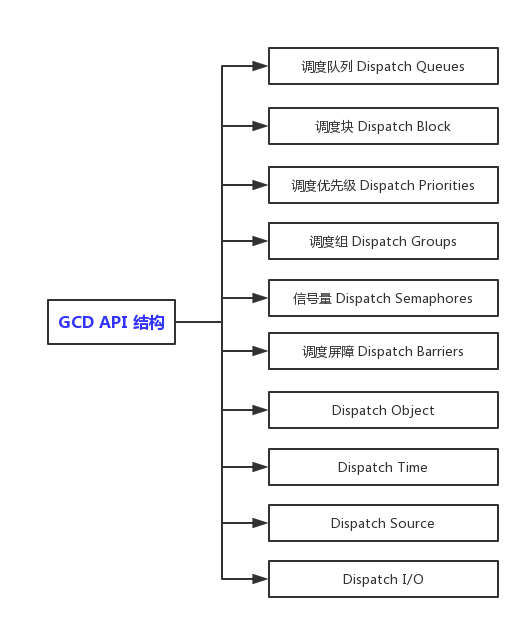
系统所提供的 API,完全可以满足我们日常开发需求了。下面就根据这些模块分别讲解一下。
1. Dispatch Queue
GCD 为我们提供了两类队列,串行队列 和 并行队列。两者的区别是:
- 串行队列中,按照 FIFO 的顺序执行任务,前面一个任务执行完,后面一个才开始执行。
- 并行队列中,也是按照 FIFO 的顺序执行任务,只要前一个被拿去执行,继而后面一个就开始执行,后面的任务无需等到前面的任务执行完再开始执行。
除此之外,还要解释一个容易混淆的概念,并发和并行:
- 并发:是指单独部分可以同时执行,但是需要系统决定怎样发生。
- 并行:两个任务互不干扰,同时执行。单核设备,系统需要通过切换上下文来实现并发;多核设备,系统可以通过并行来执行并发任务。
最后,还有一个概念,同步和异步:
- 同步 : 同步执行的任务会阻塞当前线程。
- 异步 : 异步执行的任务不会阻塞当前线程。是否开启新的线程,由系统管理。如果当前有空闲的线程,使用当前线程执行这个异步任务;如果没有空闲的线程,而且线程数量没有达到系统最大,则开启新的线程;如果线程数量已经达到系统最大,则需要等待其他线程中任务执行完毕。
队列
我们使用时,一般使用这几个队列:
-
主队列 - dispatch_get_main_queue :一个特殊的串行队列。在 GCD 中,方法主队列中的任务都是在主线程执行。当我们更新 UI 时想 dispatch 到主线程,可以使用这个队列。
- (void)viewDidLoad { [super viewDidLoad]; dispatch_async(dispatch_get_main_queue(), ^{ // UI 相关操作 });
} ```
-
全局并行队列 - dispatch_get_global_queue : 系统提供的一个全局并行队列,我们可以通过指定参数,来获取不同优先级的队列。系统提供了四个优先级,所以也可以认为系统为我们提供了四个并行队列,分别为 :
- DISPATCH_QUEUE_PRIORITY_HIGH
- DISPATCH_QUEUE_PRIORITY_DEFAULT
- DISPATCH_QUEUE_PRIORITY_LOW
- DISPATCH_QUEUE_PRIORITY_BACKGROUND
dispatch_queue_t queue = dispatch_get_global_queue(DISPATCH_QUEUE_PRIORITY_HIGH, 0); dispatch_async(queue, ^{ // 相关操作 }); -
自定义队列 :你可以自己定义串行或者并行队列,来执行一些相关的任务,平时开发中也建议用自定义队列。创建自定义队列时,需要两个参数。一个是队列的名字,方便我们再调试时查找队列使用,命名方式采用的是反向 DNS 命名规则;一个是队列类型,传 NULL 或者 DISPATCH_QUEUE_SERIAL 代表串行队列,传 DISPATCH_QUEUE_CONCURRENT 代表并行队列,通常情况下,不要传 NULL,会降低可读性。 DISPATCH_QUEUE_SERIAL_INACTIVE 代表串行不活跃队列,DISPATCH_QUEUE_CONCURRENT_INACTIVE 代表并行不活跃队列,在执行 block 任务时,需要被激活。
dispatch_queue_t queue = dispatch_queue_create("com.bool.dispatch",DISPATCH_QUEUE_SERIAL); ```
- 你可以使用
dispatch_queue_set_specific、dispatch_queue_get_specific和dispatch_get_specific方法,为 queue 设置关联的 key 或者根据 key 找到关联对象等操作。
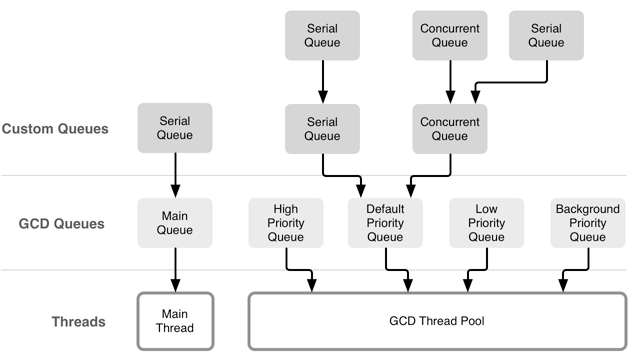
可以说,系统为我们提供了 5 中不同的队列,运行在主线程中的 main queue;3 个不同优先级的 global queue; 一个优先级更低的 background queue。除此之外,开发者可以自定义一些串行和并行队列,这些自定义队列中被调度的所有 block 最终都会被放到系统全局队列和线程池中,后面会讲这部分原理。盗用一张经典图:
同步 VS 异步
我们大多数情况下,都是使用 dispatch_asyn() 做异步操作,因为程序本来就是顺序执行,很少用到同步操作。有时候我们会把 dispatch_syn() 当做锁来用,以达到保护的作用。
系统维护的是一个队列,根据 FIFO 的规则,将 dispatch 到队列中的任务一一执行。有时候我们想把一些任务延后执行以下,例如 App 启动时,我想让主线程中一个耗时的工作放在后,可以尝试用一下 dispatch_asyn(),相当于把任务重新追加到了队尾。
dispatch_async(dispatch_get_main_queue(), ^{
// 想要延后的任务
});
通常情况下,我们使用 dispatch_asyn() 是不会造成死锁的。死锁一般出现在使用 dispatch_syn() 的时候。例如:
dispatch_sync(dispatch_get_main_queue(), ^{
NSLog(@"dead lock");
});
想上面这样写,启动就会报错误。以下情况也如此:
dispatch_queue_t queue = dispatch_queue_create("com.bool.dispatch", DISPATCH_QUEUE_SERIAL);
dispatch_async(queue, ^{
NSLog(@"dispatch asyn");
dispatch_sync(queue, ^{
NSLog(@"dispatch asyn -> dispatch syn");
});
});
在上面的代码中,dispatch_asyn() 整个 block(称作 blcok_asyn) 当做一个任务追加到串行队列队尾,然后开始执行。在 block_asyn 内部中,又进行了 dispatch_syn(),想想要执行 block_syn。因为是串行队列,需要前一个执行完(block_asyn),再执行后面一个(block_syn);但是要执行完 block_asyn,需要执行内部的 block_syn。互相等待,形成死锁。
现实开发中,还有更复杂的死锁场景。不过现在编译器很友好,我们能在编译执行时就检测到了。
基本原理
针对下面这几行代码,我们分析一下它的底层过程:
- (void)viewDidLoad {
[super viewDidLoad];
dispatch_queue_t queue = dispatch_queue_create("com.bool.dispatch", DISPATCH_QUEUE_SERIAL);
dispatch_async(queue, ^{
NSLog(@"dispatch asyn test");
});
}
创建队列
源码很长,但实际只有一个方法,逻辑比较清晰,如下:
/** 开发者调用的方法 */
dispatch_queue_t
dispatch_queue_create(const char *label, dispatch_queue_attr_t attr)
{
return _dispatch_queue_create_with_target(label, attr,
DISPATCH_TARGET_QUEUE_DEFAULT, true);
}
/** 内部实际调用方法 */
DISPATCH_NOINLINE
static dispatch_queue_t
_dispatch_queue_create_with_target(const char *label, dispatch_queue_attr_t dqa,
dispatch_queue_t tq, bool legacy)
{
// 1.初步判断
if (!slowpath(dqa)) {
dqa = _dispatch_get_default_queue_attr();
} else if (dqa->do_vtable != DISPATCH_VTABLE(queue_attr)) {
DISPATCH_CLIENT_CRASH(dqa->do_vtable, "Invalid queue attribute");
}
// 2.配置队列参数
dispatch_qos_t qos = _dispatch_priority_qos(dqa->dqa_qos_and_relpri);
#if !HAVE_PTHREAD_WORKQUEUE_QOS
if (qos == DISPATCH_QOS_USER_INTERACTIVE) {
qos = DISPATCH_QOS_USER_INITIATED;
}
if (qos == DISPATCH_QOS_MAINTENANCE) {
qos = DISPATCH_QOS_BACKGROUND;
}
#endif // !HAVE_PTHREAD_WORKQUEUE_QOS
_dispatch_queue_attr_overcommit_t overcommit = dqa->dqa_overcommit;
if (overcommit != _dispatch_queue_attr_overcommit_unspecified && tq) {
if (tq->do_targetq) {
DISPATCH_CLIENT_CRASH(tq, "Cannot specify both overcommit and "
"a non-global target queue");
}
}
if (tq && !tq->do_targetq &&
tq->do_ref_cnt == DISPATCH_OBJECT_GLOBAL_REFCNT) {
// Handle discrepancies between attr and target queue, attributes win
if (overcommit == _dispatch_queue_attr_overcommit_unspecified) {
if (tq->dq_priority & DISPATCH_PRIORITY_FLAG_OVERCOMMIT) {
overcommit = _dispatch_queue_attr_overcommit_enabled;
} else {
overcommit = _dispatch_queue_attr_overcommit_disabled;
}
}
if (qos == DISPATCH_QOS_UNSPECIFIED) {
dispatch_qos_t tq_qos = _dispatch_priority_qos(tq->dq_priority);
tq = _dispatch_get_root_queue(tq_qos,
overcommit == _dispatch_queue_attr_overcommit_enabled);
} else {
tq = NULL;
}
} else if (tq && !tq->do_targetq) {
// target is a pthread or runloop root queue, setting QoS or overcommit
// is disallowed
if (overcommit != _dispatch_queue_attr_overcommit_unspecified) {
DISPATCH_CLIENT_CRASH(tq, "Cannot specify an overcommit attribute "
"and use this kind of target queue");
}
if (qos != DISPATCH_QOS_UNSPECIFIED) {
DISPATCH_CLIENT_CRASH(tq, "Cannot specify a QoS attribute "
"and use this kind of target queue");
}
} else {
if (overcommit == _dispatch_queue_attr_overcommit_unspecified) {
// Serial queues default to overcommit!
overcommit = dqa->dqa_concurrent ?
_dispatch_queue_attr_overcommit_disabled :
_dispatch_queue_attr_overcommit_enabled;
}
}
if (!tq) {
tq = _dispatch_get_root_queue(
qos == DISPATCH_QOS_UNSPECIFIED ? DISPATCH_QOS_DEFAULT : qos,
overcommit == _dispatch_queue_attr_overcommit_enabled);
if (slowpath(!tq)) {
DISPATCH_CLIENT_CRASH(qos, "Invalid queue attribute");
}
}
// 3. 初始化队列
if (legacy) {
// if any of these attributes is specified, use non legacy classes
if (dqa->dqa_inactive || dqa->dqa_autorelease_frequency) {
legacy = false;
}
}
const void *vtable;
dispatch_queue_flags_t dqf = 0;
if (legacy) {
vtable = DISPATCH_VTABLE(queue);
} else if (dqa->dqa_concurrent) {
vtable = DISPATCH_VTABLE(queue_concurrent);
} else {
vtable = DISPATCH_VTABLE(queue_serial);
}
switch (dqa->dqa_autorelease_frequency) {
case DISPATCH_AUTORELEASE_FREQUENCY_NEVER:
dqf |= DQF_AUTORELEASE_NEVER;
break;
case DISPATCH_AUTORELEASE_FREQUENCY_WORK_ITEM:
dqf |= DQF_AUTORELEASE_ALWAYS;
break;
}
if (legacy) {
dqf |= DQF_LEGACY;
}
if (label) {
const char *tmp = _dispatch_strdup_if_mutable(label);
if (tmp != label) {
dqf |= DQF_LABEL_NEEDS_FREE;
label = tmp;
}
}
dispatch_queue_t dq = _dispatch_object_alloc(vtable,
sizeof(struct dispatch_queue_s) - DISPATCH_QUEUE_CACHELINE_PAD);
_dispatch_queue_init(dq, dqf, dqa->dqa_concurrent ?
DISPATCH_QUEUE_WIDTH_MAX : 1, DISPATCH_QUEUE_ROLE_INNER |
(dqa->dqa_inactive ? DISPATCH_QUEUE_INACTIVE : 0));
dq->dq_label = label;
#if HAVE_PTHREAD_WORKQUEUE_QOS
dq->dq_priority = dqa->dqa_qos_and_relpri;
if (overcommit == _dispatch_queue_attr_overcommit_enabled) {
dq->dq_priority |= DISPATCH_PRIORITY_FLAG_OVERCOMMIT;
}
#endif
_dispatch_retain(tq);
if (qos == QOS_CLASS_UNSPECIFIED) {
// legacy way of inherithing the QoS from the target
_dispatch_queue_priority_inherit_from_target(dq, tq);
}
if (!dqa->dqa_inactive) {
_dispatch_queue_inherit_wlh_from_target(dq, tq);
}
dq->do_targetq = tq;
_dispatch_object_debug(dq, "%s", __func__);
return _dispatch_introspection_queue_create(dq);
}
根据代码生成的流程图,不想看代码直接看图,下同:
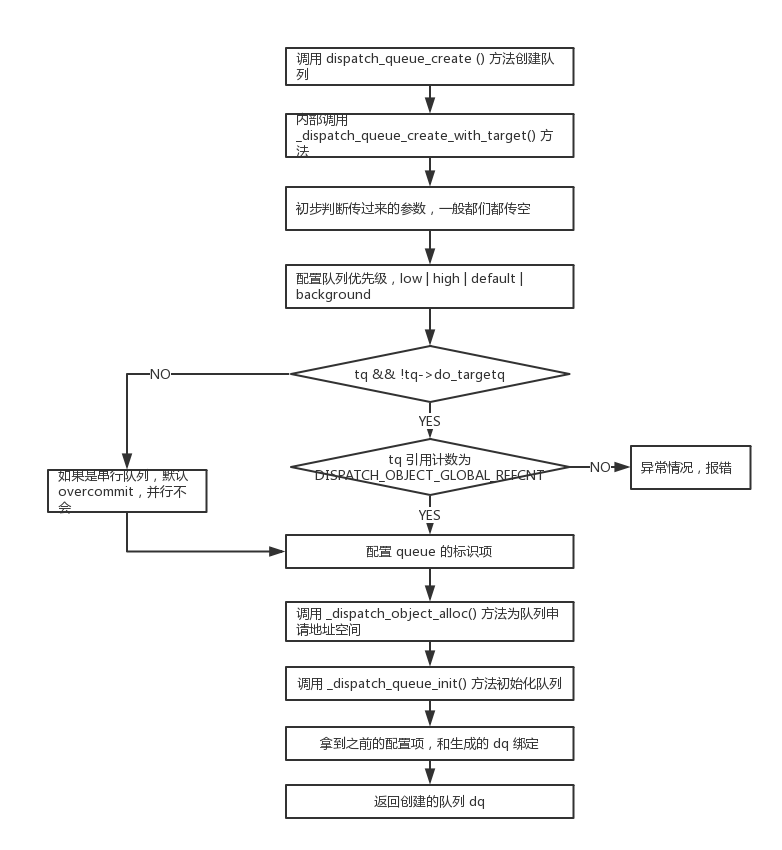
根据流程图,这个方法的步骤如下:
- 开发者调用
dispatch_queue_create()方法之后,内部会调用_dispatch_queue_create_with_target()方法。 - 然后进行初步判断,多数情况下,我们是不会传队列类型的,都是穿 NULL,所以这里是个 slowpath。如果传了参数,但是不是规定的队列类型,系统会认为你是个智障,并抛出错误。
- 然后初始化一些配置项。主要是 target_queue,overcommit 项和 qos。target_queue 是依赖的目标队列,像任何队列提交的任务(block),最终都会放到目标队列中执行;支持 overcommit 时,每当想队列提交一个任务时,都会开一个新的线程处理,这样是为了避免单一线程任务太多而过载;qos 是队列优先级,之前已经说过。
- 然后进入判断分支。普通的串行队列的目标队列,就是一个支持 overcommit 的全局队列(对应 else 分支);当前 tq 对象的引用计数为 DISPATCH_OBJECT_GLOBAL_REFCNT (永远不会释放)时,且还没有目标队列时,才可以设置 overcommit 项,而且当优先级为 DISPATCH_QOS_UNSPECIFIED 时,需要重置 tq (对应 if 分支);其他情况(else if 分支)。
- 然后配置队列的标识,以方便在调试时找到自己的那个队列。
- 使用
_dispatch_object_alloc方法申请一个 dispatch_queue_t 对象空间,dq。 - 根据传入的信息(并行 or 串行;活跃 or 非活跃)来初始化这个队列。并行队列的 width 会设置为
DISPATCH_QUEUE_WIDTH_MAX即最大,不设限;串行的会设置为 1。 - 将上面获得配置项,目标队列,是否支持 overcommit,优先级和 dq 绑定。
- 返回这个队列。返回去还输出了一句信息,便于调试。
异步执行
这个版本异步执行的代码,因为方法拆分很多,所以显得很乱。源码如下:
/** 开发者调用 */
void
dispatch_async(dispatch_queue_t dq, dispatch_block_t work)
{
dispatch_continuation_t dc = _dispatch_continuation_alloc();
uintptr_t dc_flags = DISPATCH_OBJ_CONSUME_BIT;
_dispatch_continuation_init(dc, dq, work, 0, 0, dc_flags);
_dispatch_continuation_async(dq, dc);
}
/** 内部调用,包一层,再深入调用 */
DISPATCH_NOINLINE
void
_dispatch_continuation_async(dispatch_queue_t dq, dispatch_continuation_t dc)
{
_dispatch_continuation_async2(dq, dc,
dc->dc_flags & DISPATCH_OBJ_BARRIER_BIT);
}
/** 根据 barrier 关键字区别串行还是并行,分两支 */
DISPATCH_ALWAYS_INLINE
static inline void
_dispatch_continuation_async2(dispatch_queue_t dq, dispatch_continuation_t dc,
bool barrier)
{
if (fastpath(barrier || !DISPATCH_QUEUE_USES_REDIRECTION(dq->dq_width))) {
// 串行
return _dispatch_continuation_push(dq, dc);
}
// 并行
return _dispatch_async_f2(dq, dc);
}
/** 并行又多了一层调用,就是这个方法 */
DISPATCH_NOINLINE
static void
_dispatch_async_f2(dispatch_queue_t dq, dispatch_continuation_t dc)
{
if (slowpath(dq->dq_items_tail)) {// 少路径
return _dispatch_continuation_push(dq, dc);
}
if (slowpath(!_dispatch_queue_try_acquire_async(dq))) {// 少路径
return _dispatch_continuation_push(dq, dc);
}
// 多路径
return _dispatch_async_f_redirect(dq, dc,
_dispatch_continuation_override_qos(dq, dc));
}
/** 主要用来重定向 */
DISPATCH_NOINLINE
static void
_dispatch_async_f_redirect(dispatch_queue_t dq,
dispatch_object_t dou, dispatch_qos_t qos)
{
if (!slowpath(_dispatch_object_is_redirection(dou))) {
dou._dc = _dispatch_async_redirect_wrap(dq, dou);
}
dq = dq->do_targetq;
// Find the queue to redirect to
while (slowpath(DISPATCH_QUEUE_USES_REDIRECTION(dq->dq_width))) {
if (!fastpath(_dispatch_queue_try_acquire_async(dq))) {
break;
}
if (!dou._dc->dc_ctxt) {
dou._dc->dc_ctxt = (void *)
(uintptr_t)_dispatch_queue_autorelease_frequency(dq);
}
dq = dq->do_targetq;
}
// 同步异步最终都是调用的这个方法,将任务追加到队列中
dx_push(dq, dou, qos);
}
... 省略一些调用层级,
/** 核心方法,通过 dc_flags 参数区分了是 group,还是串行,还是并行 */
DISPATCH_ALWAYS_INLINE
static inline void
_dispatch_continuation_invoke_inline(dispatch_object_t dou, voucher_t ov,
dispatch_invoke_flags_t flags)
{
dispatch_continuation_t dc = dou._dc, dc1;
dispatch_invoke_with_autoreleasepool(flags, {
uintptr_t dc_flags = dc->dc_flags;
_dispatch_continuation_voucher_adopt(dc, ov, dc_flags);
if (dc_flags & DISPATCH_OBJ_CONSUME_BIT) { // 并行
dc1 = _dispatch_continuation_free_cacheonly(dc);
} else {
dc1 = NULL;
}
if (unlikely(dc_flags & DISPATCH_OBJ_GROUP_BIT)) { // group
_dispatch_continuation_with_group_invoke(dc);
} else { // 串行
_dispatch_client_callout(dc->dc_ctxt, dc->dc_func);
_dispatch_introspection_queue_item_complete(dou);
}
if (unlikely(dc1)) {
_dispatch_continuation_free_to_cache_limit(dc1);
}
});
_dispatch_perfmon_workitem_inc();
}
不想看代码,直接看图:
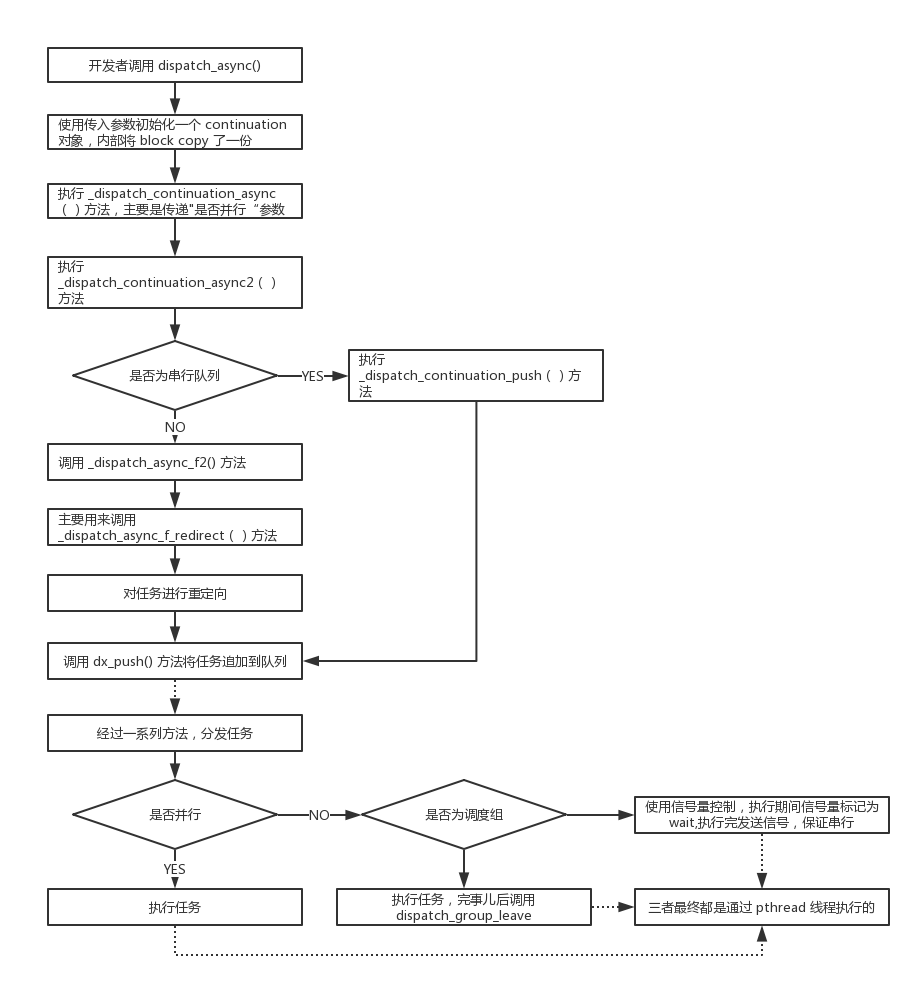
根据流程图描述一下过程:
- 首先开发者调用
dispatch_async()方法,然后内部创建了一个_dispatch_continuation_init队列,将 queue、block 这些信息和这个 dc 绑定起来。这过程中 copy 了 block。 - 然后经过了几个层次的调用,主要为了区分并行还是串行。
- 如果是串行(这种情况比较常见,所以是 fastpath),直接就 dx_push 了,其实就是讲任务追加到一个链表里面。
- 如果是并行,需要做重定向。之前我们说过,放到队列中的任务,最终都会以各种形式追加到目标队列里面。在
_dispatch_async_f_redirect方法中,重新寻找依赖目标队列,然后追加过去。 - 经过一系列调用,我们会在
_dispatch_continuation_invoke_inline方法里区分串行还是并行。因为这个方法会被频繁调用,所以定义成了内联函数。对于串行队列,我们使用信号量控制,执行前信号量置为 wait,执行完毕后发送 singal;对于调度组,我们会在执行完之后调用dispatch_group_leave。 - 底层的线程池,是使用 pthread 维护的,所以最终都会使用 pthread 来处理这些任务。
同步执行
同步执行,相对来说比较简单,源码如下 :
/** 开发者调用 */
void
dispatch_sync(dispatch_queue_t dq, dispatch_block_t work)
{
if (unlikely(_dispatch_block_has_private_data(work))) {
return _dispatch_sync_block_with_private_data(dq, work, 0);
}
dispatch_sync_f(dq, work, _dispatch_Block_invoke(work));
}
/** 内部调用 */
DISPATCH_NOINLINE
void
dispatch_sync_f(dispatch_queue_t dq, void *ctxt, dispatch_function_t func)
{
if (likely(dq->dq_width == 1)) {
return dispatch_barrier_sync_f(dq, ctxt, func);
}
// Global concurrent queues and queues bound to non-dispatch threads
// always fall into the slow case, see DISPATCH_ROOT_QUEUE_STATE_INIT_VALUE
if (unlikely(!_dispatch_queue_try_reserve_sync_width(dq))) {
return _dispatch_sync_f_slow(dq, ctxt, func, 0);
}
_dispatch_introspection_sync_begin(dq);
if (unlikely(dq->do_targetq->do_targetq)) {
return _dispatch_sync_recurse(dq, ctxt, func, 0);
}
_dispatch_sync_invoke_and_complete(dq, ctxt, func);
}
同步执行,相对来说简单些,大体逻辑差不多。偷懒一下,就不画图了,直接描述:
- 开发者使用
dispatch_sync()方法,大多数路径,都会调用dispatch_sync_f()方法。 - 如果是串行队列,则通过
dispatch_barrier_sync_f()方法来保证原子操作。 - 如果不是串行的(一般很少),我们使用
_dispatch_introspection_sync_begin和_dispatch_sync_invoke_and_complete来保证同步。
dispatch_after
dispatch_after 一般用于延后执行一些任务,可以用来代替 NSTimer,因为有时候 NSTimer 问题太多了。在后面的一章里,我会总体讲一下多线程中的问题,这里就不详细说了。一般我们这样来使用 dispatch_after :
- (void)viewDidLoad {
[super viewDidLoad];
dispatch_queue_t queue = dispatch_queue_create("com.bool.dispatch", DISPATCH_QUEUE_SERIAL);
dispatch_after(dispatch_time(DISPATCH_TIME_NOW, (int64_t)(NSEC_PER_SEC * 2.0f)),queue, ^{
// 2.0 second execute
});
}
在做页面过渡时,刚进入到新的页面我们并不会立即更新一些 view,为了引起用户注意,我们会过会儿再进行更新,可以中此 API 来完成。
源码如下:
DISPATCH_ALWAYS_INLINE
static inline void
_dispatch_after(dispatch_time_t when, dispatch_queue_t queue,
void *ctxt, void *handler, bool block)
{
dispatch_timer_source_refs_t dt;
dispatch_source_t ds;
uint64_t leeway, delta;
if (when == DISPATCH_TIME_FOREVER) {
#if DISPATCH_DEBUG
DISPATCH_CLIENT_CRASH(0, "dispatch_after called with 'when' == infinity");
#endif
return;
}
delta = _dispatch_timeout(when);
if (delta == 0) {
if (block) {
return dispatch_async(queue, handler);
}
return dispatch_async_f(queue, ctxt, handler);
}
leeway = delta / 10; // <rdar://problem/13447496>
if (leeway < NSEC_PER_MSEC) leeway = NSEC_PER_MSEC;
if (leeway > 60 * NSEC_PER_SEC) leeway = 60 * NSEC_PER_SEC;
// this function can and should be optimized to not use a dispatch source
ds = dispatch_source_create(&_dispatch_source_type_after, 0, 0, queue);
dt = ds->ds_timer_refs;
dispatch_continuation_t dc = _dispatch_continuation_alloc();
if (block) {
_dispatch_continuation_init(dc, ds, handler, 0, 0, 0);
} else {
_dispatch_continuation_init_f(dc, ds, ctxt, handler, 0, 0, 0);
}
// reference `ds` so that it doesn't show up as a leak
dc->dc_data = ds;
_dispatch_trace_continuation_push(ds->_as_dq, dc);
os_atomic_store2o(dt, ds_handler[DS_EVENT_HANDLER], dc, relaxed);
if ((int64_t)when < 0) {
// wall clock
when = (dispatch_time_t)-((int64_t)when);
} else {
// absolute clock
dt->du_fflags |= DISPATCH_TIMER_CLOCK_MACH;
leeway = _dispatch_time_nano2mach(leeway);
}
dt->dt_timer.target = when;
dt->dt_timer.interval = UINT64_MAX;
dt->dt_timer.deadline = when + leeway;
dispatch_activate(ds);
}
dispatch_after() 内部会调用 _dispatch_after() 方法,然后先判断延迟时间。如果为 DISPATCH_TIME_FOREVER(永远不执行),则会出现异常;如果为 0 则立即执行;否则的话会创建一个 dispatch_timer_source_refs_t 结构体指针,将上下文相关信息与之关联。然后使用 dispatch_source 相关方法,将定时器和 block 任务关联起来。定时器时间到时,取出 block 任务开始执行。
dispatch_once
如果我们有一段代码,在 App 生命周期内最好只初始化一次,这时候使用 dispatch_once 最好不过了。例如我们单例中经常这样用:
+ (instancetype)sharedManager {
static BLDispatchManager *sharedInstance = nil;
static dispatch_once_t onceToken;
dispatch_once(&onceToken, ^{
sharedInstance = [[BLDispatchManager alloc] initPrivate];
});
return sharedInstance;
}
还有在定义 NSDateFormatter 时使用:
- (NSString *)todayDateString {
static NSDateFormatter *formatter = nil;
static dispatch_once_t onceToken;
dispatch_once(&onceToken, ^{
formatter = [NSDateFormatter new];
formatter.locale = [NSLocale localeWithLocaleIdentifier:@"en_US_POSIX"];
formatter.timeZone = [NSTimeZone timeZoneForSecondsFromGMT:8 * 3600];
formatter.dateFormat = @"yyyyMMdd";
});
return [formatter stringFromDate:[NSDate date]];
}
因为这是很常用的一个代码片段,所以被加在了 Xcode 的 code snippet 中。
它的源代码如下:
/** 一个结构体,里面为当前的信号量、线程端口和指向下一个节点的指针 */
typedef struct _dispatch_once_waiter_s {
volatile struct _dispatch_once_waiter_s *volatile dow_next;
dispatch_thread_event_s dow_event;
mach_port_t dow_thread;
} *_dispatch_once_waiter_t;
/** 我们调用的方法 */
void
dispatch_once(dispatch_once_t *val, dispatch_block_t block)
{
dispatch_once_f(val, block, _dispatch_Block_invoke(block));
}
/** 实际执行的方法 */
DISPATCH_NOINLINE
void
dispatch_once_f(dispatch_once_t *val, void *ctxt, dispatch_function_t func)
{
#if !DISPATCH_ONCE_INLINE_FASTPATH
if (likely(os_atomic_load(val, acquire) == DLOCK_ONCE_DONE)) {
return;
}
#endif // !DISPATCH_ONCE_INLINE_FASTPATH
return dispatch_once_f_slow(val, ctxt, func);
}
DISPATCH_ONCE_SLOW_INLINE
static void
dispatch_once_f_slow(dispatch_once_t *val, void *ctxt, dispatch_function_t func)
{
#if DISPATCH_GATE_USE_FOR_DISPATCH_ONCE
dispatch_once_gate_t l = (dispatch_once_gate_t)val;
if (_dispatch_once_gate_tryenter(l)) {
_dispatch_client_callout(ctxt, func);
_dispatch_once_gate_broadcast(l);
} else {
_dispatch_once_gate_wait(l);
}
#else
_dispatch_once_waiter_t volatile *vval = (_dispatch_once_waiter_t*)val;
struct _dispatch_once_waiter_s dow = { };
_dispatch_once_waiter_t tail = &dow, next, tmp;
dispatch_thread_event_t event;
if (os_atomic_cmpxchg(vval, NULL, tail, acquire)) {
dow.dow_thread = _dispatch_tid_self();
_dispatch_client_callout(ctxt, func);
next = (_dispatch_once_waiter_t)_dispatch_once_xchg_done(val);
while (next != tail) {
tmp = (_dispatch_once_waiter_t)_dispatch_wait_until(next->dow_next);
event = &next->dow_event;
next = tmp;
_dispatch_thread_event_signal(event);
}
} else {
_dispatch_thread_event_init(&dow.dow_event);
next = *vval;
for (;;) {
if (next == DISPATCH_ONCE_DONE) {
break;
}
if (os_atomic_cmpxchgv(vval, next, tail, &next, release)) {
dow.dow_thread = next->dow_thread;
dow.dow_next = next;
if (dow.dow_thread) {
pthread_priority_t pp = _dispatch_get_priority();
_dispatch_thread_override_start(dow.dow_thread, pp, val);
}
_dispatch_thread_event_wait(&dow.dow_event);
if (dow.dow_thread) {
_dispatch_thread_override_end(dow.dow_thread, val);
}
break;
}
}
_dispatch_thread_event_destroy(&dow.dow_event);
}
#endif
}
不想看代码直接看图 (emmm... 根据逻辑画完图才发现,其实这个图也挺乱的,所以我将两个主分支用不同颜色标记处理):
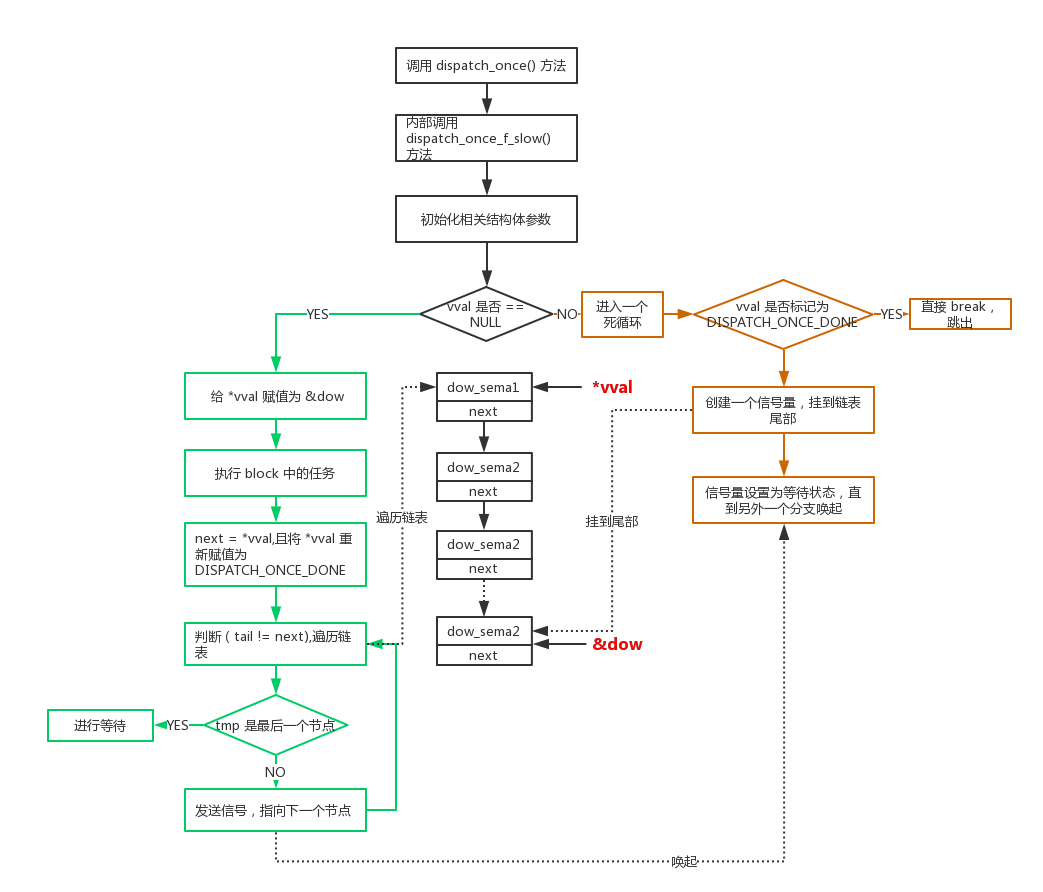
根据这个图,我来表述一下主要过程:
-
我们调用
dispatch_once()方法之后,内部多数情况下会调用dispatch_once_f_slow()方法,这个方法才是真正的执行方法。 -
os_atomic_cmpxchg(vval, NULL, tail, acquire)这个方法,执行过程实际是这个样子if (*vval == NULL) { *vval = tail = &dow; return true; } else { return false }我们初始化的 once_token,也就是 *vval 实际是 0,所以第一次执行时是返回 true 的。if() 中的这个方法是原子操作,也就是说,如果多个线程同时调用这个方法,只有一个线程会进入 true 的分支,其他都进入 else 分支。
-
这里先说进入 true 分支。进入之后,会执行对应的 block,也就是对应的任务。然后 next 指向 *vval, *vval 标记为
DISPATCH_ONCE_DONE,即执行的是这样一个过程:next = (_dispatch_once_waiter_t)_dispatch_once_xchg_done(val); // 实际执行时这样的 next = *vval; *vval = DISPATCH_ONCE_DONE; -
然后
tail = &dow。此时我们发现,原来的*vval = &dow -> next = *vval,实际则是next = &dow,如果没有其他线程(或者调用)进入 else 分支,&dow 实际没有改变,即tail == tmp。此时while (tail != tmp)是不会执行的,分支结束。 -
如果有其他线程(或者调用)进入了 else 分支,那么就已经生成了一个等待响应的链表。此时进入 &dow 已经改变,成为了链表尾部,*vval 是链表头部。进入 while 循环后,开始遍历链表,依次发送信号进行唤起。
-
然后说进入 else 分支的这些调用。进入分支后,随即进入一个死循环,直到发现 *vval 已经标记为了
DISPATCH_ONCE_DONE才跳出循环。 -
发现 *vval 不是
DISPATCH_ONCE_DONE之后,会将这个节点追加到链表尾部,并调用信号量的 wait 方法,等待被唤起。
以上为全部的执行过程。通过源码可以看出,使用的是 原子操作 + 信号量来保证 block 只会被执行多次,哪怕是在多线程情况下。
这样一个关于 dispatch_once 递归调用会产生死锁的现象,也就很好解释了。看下面代码:
- (void)dispatchOnceTest {
static dispatch_once_t onceToken;
dispatch_once(&onceToken, ^{
[self dispatchOnceTest];
});
}
通过上面分析,在 block 执行完,并将 *vval 置为 DISPATCH_ONCE_DONE 之前,其他的调用都会进入 else 分支。第二次递归调用,信号量处于等待状态,需要等到第一个 block 执行完才能被唤起;但是第一个 block 所执行的内容就是进行第二次调用,这个任务被 wait 了,也即是说 block 永远执行不完。死锁就这样发生了。
dispatch_apply
有时候没有时序性依赖的时候,我们会用 dispatch_apply 来代替 for loop。例如我们下载一组图片:
/** 使用 for loop */
- (void)downloadImages:(NSArray <NSURL *> *)imageURLs {
for (NSURL *imageURL in imageURLs) {
[self downloadImageWithURL:imageURL];
}
}
/** dispatch_apply */
- (void)downloadImages:(NSArray <NSURL *> *)imageURLs {
dispatch_queue_t downloadQueue = dispatch_queue_create("com.bool.download", DISPATCH_QUEUE_CONCURRENT);
dispatch_apply(imageURLs.count, downloadQueue, ^(size_t index) {
NSURL *imageURL = imageURLs[index];
[self downloadImageWithURL:imageURL];
});
}
进行替换是需要注意几个问题:
- 任务之间没有时序性依赖,谁先执行都可以。
- 一般在并发队列,并发执行任务时,才替换。串行队列替换没有意义。
- 如果数组中数据很少,或者每个任务执行时间很短,替换也没有意义。强行进行并发的消耗,可能比使用 for loop 还要多,并不能得到优化。
至于原理,就不大篇幅讲了。大概是这个样子:这个方法是同步的,会阻塞当前线程,直到所有的 block 任务都完成。如果提交到并发队列,每个任务执行顺序是不一定的。
更多时候,我们执行下载任务,并不希望阻塞当前线程,这时我们可以使用 dispatch_group。
dispatch_group
当处理批量异步任务时,dispatch_group 是一个很好的选择。针对上面说的下载图片的例子,我们可以这样做:
- (void)downloadImages:(NSArray <NSURL *> *)imageURLs {
dispatch_group_t taskGroup = dispatch_group_create();
dispatch_queue_t queue = dispatch_queue_create("com.bool.group", DISPATCH_QUEUE_CONCURRENT);
for (NSURL *imageURL in imageURLs) {
dispatch_group_enter(taskGroup);
// 下载方法是异步的
[self downloadImageWithURL:imageURL withQueue:queue completeHandler:^{
dispatch_group_leave(taskGroup);
}];
}
dispatch_group_notify(taskGroup, queue, ^{
// all task finish
});
/** 如果使用这个方法,内部执行异步任务,会立即到 dispatch_group_notify 方法中,因为是异步,系统认为已经执行完了。所以这个方法使用不多。
*/
dispatch_group_async(taskGroup, queue, ^{
})
}
关于原理方面,和 dispatch_async() 方法类似,前面也提到。这里只说一段代码:
DISPATCH_ALWAYS_INLINE
static inline void
_dispatch_continuation_group_async(dispatch_group_t dg, dispatch_queue_t dq,
dispatch_continuation_t dc)
{
dispatch_group_enter(dg);
dc->dc_data = dg;
_dispatch_continuation_async(dq, dc);
}
这段代码中,调用了 dispatch_group_enter(dg) 方法进行标记,最终都会和 dispatch_async() 走到同样的方法里 _dispatch_continuation_invoke_inline()。在里面判断类型为 group,执行 task,执行结束后调用 dispatch_group_leave((dispatch_group_t)dou),和之前的 enter 对应。
以上是 Dispatch Queues 内容的介绍,我们平时使用 GCD 的过程中,60% 都是使用的以上内容。
2. Dispatch Block
在 iOS 8 中,Apple 为我们提供了新的 API,Dispatch Block 相关。虽然之前我们可以向 dispatch 传递 block 参数,作为任务,但是这里和之前的不一样。之前经常说,使用 NSOperation 创建的任务可以 cancel,使用 GCD 不可以。但是在 iOS 8 之后,可以 cancel 任务了。
基本使用
-
创建一个 block 并执行。
- (void)dispatchBlockTest { // 不指定优先级 dispatch_block_t dsBlock = dispatch_block_create(0, ^{ NSLog(@"test block"); }); // 指定优先级 dispatch_block_t dsQosBlock = dispatch_block_create_with_qos_class(0, QOS_CLASS_USER_INITIATED, -1, ^{ NSLog(@"test block"); }); dispatch_async(dispatch_get_main_queue(), dsBlock); dispatch_async(dispatch_get_main_queue(), dsQosBlock); // 直接创建并执行 dispatch_block_perform(0, ^{ NSLog(@"test block"); });
} ```
-
阻塞当前任务,等 block 执行完在继续执行。
- (void)dispatchBlockTest { dispatch_queue_t queue = dispatch_queue_create("com.bool.block", DISPATCH_QUEUE_SERIAL); dispatch_block_t dsBlock = dispatch_block_create(0, ^{ NSLog(@"test block"); }); dispatch_async(queue, dsBlock); // 等到 block 执行完 dispatch_block_wait(dsBlock, DISPATCH_TIME_FOREVER); NSLog(@"block was finished"); } -
block 执行完后,收到通知,执行其他任务
- (void)dispatchBlockTest { dispatch_queue_t queue = dispatch_queue_create("com.bool.block", DISPATCH_QUEUE_SERIAL); dispatch_block_t dsBlock = dispatch_block_create(0, ^{ NSLog(@"test block"); }); dispatch_async(queue, dsBlock); // block 执行完收到通知 dispatch_block_notify(dsBlock, queue, ^{ NSLog(@"block was finished,do other thing"); }); NSLog(@"execute first"); } -
对 block 进行 cancel 操作
- (void)dispatchBlockTest { dispatch_queue_t queue = dispatch_queue_create("com.bool.block", DISPATCH_QUEUE_SERIAL); dispatch_block_t dsBlock1 = dispatch_block_create(0, ^{ NSLog(@"test block1"); }); dispatch_block_t dsBlock2 = dispatch_block_create(0, ^{ NSLog(@"test block2"); }); dispatch_async(queue, dsBlock1); dispatch_async(queue, dsBlock2); // 第二个 block 将会被 cancel,不执行 dispatch_block_cancel(dsBlock2); }
3. Dispatch Barriers
Dispatch Barriers 可以理解为调度屏障,常用于多线程并发读写操作。例如:
@interface ViewController ()
@property (nonatomic, strong) dispatch_queue_t imageQueue;
@property (nonatomic, strong) NSMutableArray *imageArray;
@end
@implementation ViewController
- (void)viewDidLoad {
[super viewDidLoad];
self.imageQueue = dispatch_queue_create("com.bool.image", DISPATCH_QUEUE_CONCURRENT);
self.imageArray = [NSMutableArray array];
}
/** 保证写入时不会有其他操作,写完之后到主线程更新 UI */
- (void)addImage:(UIImage *)image {
dispatch_barrier_async(self.imageQueue, ^{
[self.imageArray addObject:image];
dispatch_async(dispatch_get_main_queue(), ^{
// update UI
});
});
}
/** 这里的 dispatch_sync 起到了 lock 的作用 */
- (NSArray <UIImage *> *)images {
__block NSArray *imagesArray = nil;
dispatch_sync(self.imageQueue, ^{
imagesArray = [self.imageArray mutableCopy];
});
return imagesArray;
}
@end
转化成图可能好理解一些:
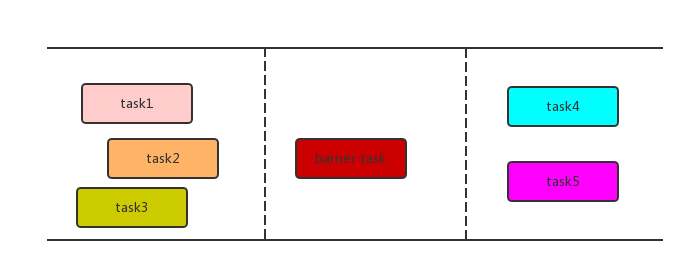
dispatch_barrier_async() 的原理和 dispatch_async() 差不多,只不过设置的 flags 不一样:
void
dispatch_barrier_async(dispatch_queue_t dq, dispatch_block_t work)
{
dispatch_continuation_t dc = _dispatch_continuation_alloc();
// 在 dispatch_async() 中只设置了 DISPATCH_OBJ_CONSUME_BIT
uintptr_t dc_flags = DISPATCH_OBJ_CONSUME_BIT | DISPATCH_OBJ_BARRIER_BIT;
_dispatch_continuation_init(dc, dq, work, 0, 0, dc_flags);
_dispatch_continuation_push(dq, dc);
}
后面都是 push 到队列中,然后,获取任务时一个死循环,在从队列中获取任务一个一个执行,如果判断 flag 为 barrier,终止循环,则单独执行这个任务。它后面的任务放入一个队列,等它执行完了再开始执行。
DISPATCH_ALWAYS_INLINE
static dispatch_queue_wakeup_target_t
_dispatch_queue_drain(dispatch_queue_t dq, dispatch_invoke_context_t dic,
dispatch_invoke_flags_t flags, uint64_t *owned_ptr, bool serial_drain)
{
...
for (;;) {
...
first_iteration:
dq_state = os_atomic_load(&dq->dq_state, relaxed);
if (unlikely(_dq_state_is_suspended(dq_state))) {
break;
}
if (unlikely(orig_tq != dq->do_targetq)) {
break;
}
if (serial_drain || _dispatch_object_is_barrier(dc)) {
if (!serial_drain && owned != DISPATCH_QUEUE_IN_BARRIER) {
if (!_dispatch_queue_try_upgrade_full_width(dq, owned)) {
goto out_with_no_width;
}
owned = DISPATCH_QUEUE_IN_BARRIER;
}
next_dc = _dispatch_queue_next(dq, dc);
if (_dispatch_object_is_sync_waiter(dc)) {
owned = 0;
dic->dic_deferred = dc;
goto out_with_deferred;
}
} else {
if (owned == DISPATCH_QUEUE_IN_BARRIER) {
// we just ran barrier work items, we have to make their
// effect visible to other sync work items on other threads
// that may start coming in after this point, hence the
// release barrier
os_atomic_xor2o(dq, dq_state, owned, release);
owned = dq->dq_width * DISPATCH_QUEUE_WIDTH_INTERVAL;
} else if (unlikely(owned == 0)) {
if (_dispatch_object_is_sync_waiter(dc)) {
// sync "readers" don't observe the limit
_dispatch_queue_reserve_sync_width(dq);
} else if (!_dispatch_queue_try_acquire_async(dq)) {
goto out_with_no_width;
}
owned = DISPATCH_QUEUE_WIDTH_INTERVAL;
}
next_dc = _dispatch_queue_next(dq, dc);
if (_dispatch_object_is_sync_waiter(dc)) {
owned -= DISPATCH_QUEUE_WIDTH_INTERVAL;
_dispatch_sync_waiter_redirect_or_wake(dq,
DISPATCH_SYNC_WAITER_NO_UNLOCK, dc);
continue;
}
...
}
4. Dispatch Source
关于 dispatch_source 我们使用的少之又少,他是 BSD 系统内核功能的包装,经常用来监测某些事件发生。例如监测断点的使用和取消。[这里][https://developer.apple.com/documentation/dispatch/dispatch_source_type_constants?language=objc] 介绍了可以监测的事件:
- DISPATCH_SOURCE_TYPE_DATA_ADD : 自定义事件
- DISPATCH_SOURCE_TYPE_DATA_OR : 自定义事件
- DISPATCH_SOURCE_TYPE_MACH_RECV : MACH 端口接收事件
- DISPATCH_SOURCE_TYPE_MACH_SEND : MACH 端口发送事件
- DISPATCH_SOURCE_TYPE_PROC : 进程相关事件
- DISPATCH_SOURCE_TYPE_READ : 文件读取事件
- DISPATCH_SOURCE_TYPE_SIGNAL : 信号相关事件
- DISPATCH_SOURCE_TYPE_TIMER : 定时器相关事件
- DISPATCH_SOURCE_TYPE_VNODE : 文件属性修改事件
- DISPATCH_SOURCE_TYPE_WRITE : 文件写入事件
- DISPATCH_SOURCE_TYPE_MEMORYPRESSURE : 内存压力事件
例如我们可以通过下面代码,来监测断点的使用和取消:
@interface ViewController ()
@property (nonatomic, strong) dispatch_source_t signalSource;
@property (nonatomic, assign) dispatch_once_t signalOnceToken;
@end
@implementation ViewController
- (void)viewDidLoad {
dispatch_once(&_signalOnceToken, ^{
dispatch_queue_t queue = dispatch_get_main_queue();
self.signalSource = dispatch_source_create(DISPATCH_SOURCE_TYPE_SIGNAL, SIGSTOP, 0, queue);
if (self.signalSource) {
dispatch_source_set_event_handler(self.signalSource, ^{
// 点击一下断点,再取消断点,便会执行这里。
NSLog(@"debug test");
});
dispatch_resume(self.signalSource);
}
});
}
还有 diapatch_after() 就是依赖 dispatch_source() 来实现的。我们可以自己实现一个类似的定时器:
- (void)customTimer {
dispatch_source_t timerSource = dispatch_source_create(DISPATCH_SOURCE_TYPE_TIMER, 0, 0, DISPATCH_TARGET_QUEUE_DEFAULT);
dispatch_source_set_timer(timerSource, dispatch_time(DISPATCH_TIME_NOW, 5.0 * NSEC_PER_SEC), 2.0 * NSEC_PER_SEC, 5);
dispatch_source_set_event_handler(timerSource, ^{
NSLog(@"dispatch source timer");
});
self.signalSource = timerSource;
dispatch_resume(self.signalSource);
}
基本原理
使用 dispatch_source 时,大致过程是这样的:我们创建一个 source,然后加到队列中,并调用 dispatch_resume() 方法,便会从队列中唤起 source,执行对应的 block。下面是一个详细的流程图,我们结合这张图来说一下:
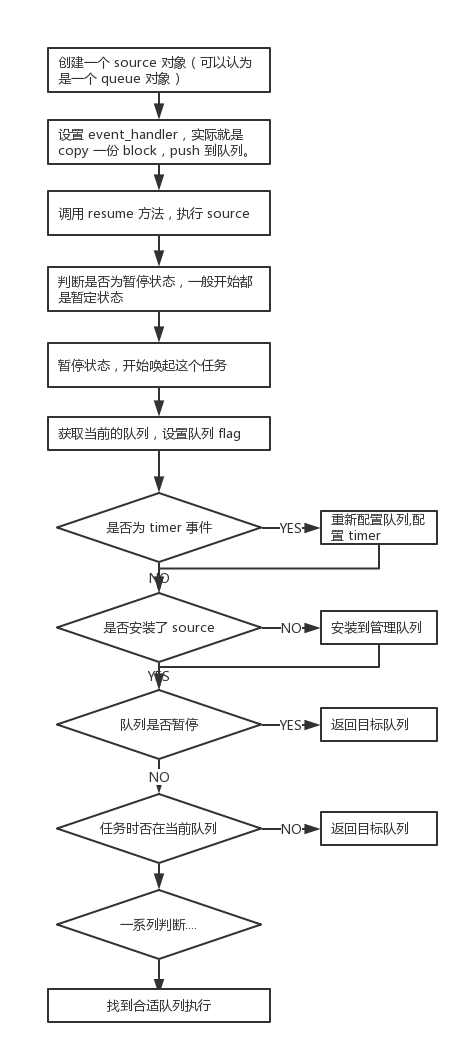
-
创建一个 source 对象,过程和创建 queue 类似,所以后面一些操作,和操作 queue 很类似。
dispatch_source_t dispatch_source_create(dispatch_source_type_t dst, uintptr_t handle, unsigned long mask, dispatch_queue_t dq) { dispatch_source_refs_t dr; dispatch_source_t ds; dr = dux_create(dst, handle, mask)._dr; if (unlikely(!dr)) { return DISPATCH_BAD_INPUT; } // 申请内存空间 ds = _dispatch_object_alloc(DISPATCH_VTABLE(source), sizeof(struct dispatch_source_s)); // 初始化一个队列,然后配置参数,完全被当做一个 queue 来处理 _dispatch_queue_init(ds->_as_dq, DQF_LEGACY, 1, DISPATCH_QUEUE_INACTIVE | DISPATCH_QUEUE_ROLE_INNER); ds->dq_label = "source"; ds->do_ref_cnt++; // the reference the manager queue holds ds->ds_refs = dr; dr->du_owner_wref = _dispatch_ptr2wref(ds); if (slowpath(!dq)) { dq = _dispatch_get_root_queue(DISPATCH_QOS_DEFAULT, true); } else { _dispatch_retain((dispatch_queue_t _Nonnull)dq); } ds->do_targetq = dq; if (dr->du_is_timer && (dr->du_fflags & DISPATCH_TIMER_INTERVAL)) { _dispatch_source_set_interval(ds, handle); } _dispatch_object_debug(ds, "%s", __func__); return ds; } -
设置 event_handler。从源码中看出,用的是
dispatch_continuation_t进行绑定,和之前绑定 queue 一样,将 block copy 了一份。后面执行的时候,拿出来用。然后将这个任务 push 到队列里。void dispatch_source_set_event_handler(dispatch_source_t ds, dispatch_block_t handler) { dispatch_continuation_t dc; // 这里实际就是在初始化 dispatch_continuation_t dc = _dispatch_source_handler_alloc(ds, handler, DS_EVENT_HANDLER, true); // 经过一顿操作,将任务 push 到队列中。 _dispatch_source_set_handler(ds, DS_EVENT_HANDLER, dc); } -
调用 resume 方法,执行 source。一般新创建的都是暂停状态,这里判断是暂停状态,就开始唤起。
void dispatch_resume(dispatch_object_t dou) { DISPATCH_OBJECT_TFB(_dispatch_objc_resume, dou); if (dx_vtable(dou._do)->do_suspend) { dx_vtable(dou._do)->do_resume(dou._do, false); } } -
最后一步,是最核心的异步,唤起任务开始执行。之前的 queue 最终也是走到这样类似的一步,可以看返回类型都是
dispatch_queue_wakeup_target_t,基本是沿着 queue 的逻辑一路 copy 过来。这个方法,经过一系列判断,保证所有的 source 都会在正确的队列上面执行;如果队列和任务不对应,那么就返回正确的队列,重新派发让任务在正确的队列上执行。DISPATCH_ALWAYS_INLINE static inline dispatch_queue_wakeup_target_t _dispatch_source_invoke2(dispatch_object_t dou, dispatch_invoke_context_t dic, dispatch_invoke_flags_t flags, uint64_t *owned) { dispatch_source_t ds = dou._ds; dispatch_queue_wakeup_target_t retq = DISPATCH_QUEUE_WAKEUP_NONE; // 获取当前 queue dispatch_queue_t dq = _dispatch_queue_get_current(); dispatch_source_refs_t dr = ds->ds_refs; dispatch_queue_flags_t dqf; ... // timer 事件处理 if (dr->du_is_timer && os_atomic_load2o(ds, ds_timer_refs->dt_pending_config, relaxed)) { dqf = _dispatch_queue_atomic_flags(ds->_as_dq); if (!(dqf & (DSF_CANCELED | DQF_RELEASED))) { // timer has to be configured on the kevent queue if (dq != dkq) { return dkq; } _dispatch_source_timer_configure(ds); } } // 是否安装 source if (!ds->ds_is_installed) { // The source needs to be installed on the kevent queue. if (dq != dkq) { return dkq; } _dispatch_source_install(ds, _dispatch_get_wlh(), _dispatch_get_basepri()); } // 是否暂停,因为之前判断过,一般不可能走到这里 if (unlikely(DISPATCH_QUEUE_IS_SUSPENDED(ds))) { // Source suspended by an item drained from the source queue. return ds->do_targetq; } // 是否在 if (_dispatch_source_get_registration_handler(dr)) { // The source has been registered and the registration handler needs // to be delivered on the target queue. if (dq != ds->do_targetq) { return ds->do_targetq; } // clears ds_registration_handler _dispatch_source_registration_callout(ds, dq, flags); } ... if (!(dqf & (DSF_CANCELED | DQF_RELEASED)) && os_atomic_load2o(ds, ds_pending_data, relaxed)) { // 有些 source 还有未完成的数据,需要通过目标队列上的回调进行传送;有些 source 则需要切换到管理队列上去。 if (dq == ds->do_targetq) { _dispatch_source_latch_and_call(ds, dq, flags); dqf = _dispatch_queue_atomic_flags(ds->_as_dq); prevent_starvation = dq->do_targetq || !(dq->dq_priority & DISPATCH_PRIORITY_FLAG_OVERCOMMIT); if (prevent_starvation && os_atomic_load2o(ds, ds_pending_data, relaxed)) { retq = ds->do_targetq; } } else { return ds->do_targetq; } } if ((dqf & (DSF_CANCELED | DQF_RELEASED)) && !(dqf & DSF_DEFERRED_DELETE)) { // 已经被取消的 source 需要从管理队列中卸载。卸载完成后,取消的 handler 需要交付到目标队列。 if (!(dqf & DSF_DELETED)) { if (dr->du_is_timer && !(dqf & DSF_ARMED)) { // timers can cheat if not armed because there's nothing left // to do on the manager queue and unregistration can happen // on the regular target queue } else if (dq != dkq) { return dkq; } _dispatch_source_refs_unregister(ds, 0); dqf = _dispatch_queue_atomic_flags(ds->_as_dq); if (unlikely(dqf & DSF_DEFERRED_DELETE)) { if (!(dqf & DSF_ARMED)) { goto unregister_event; } // we need to wait for the EV_DELETE return retq ? retq : DISPATCH_QUEUE_WAKEUP_WAIT_FOR_EVENT; } } if (dq != ds->do_targetq && (_dispatch_source_get_event_handler(dr) || _dispatch_source_get_cancel_handler(dr) || _dispatch_source_get_registration_handler(dr))) { retq = ds->do_targetq; } else { _dispatch_source_cancel_callout(ds, dq, flags); dqf = _dispatch_queue_atomic_flags(ds->_as_dq); } prevent_starvation = false; } if (_dispatch_unote_needs_rearm(dr) && !(dqf & (DSF_ARMED|DSF_DELETED|DSF_CANCELED|DQF_RELEASED))) { // 需要在管理队列进行 rearm 的 if (dq != dkq) { return dkq; } if (unlikely(dqf & DSF_DEFERRED_DELETE)) { // 如果我们可以直接注销,不需要 resume goto unregister_event; } if (unlikely(DISPATCH_QUEUE_IS_SUSPENDED(ds))) { // 如果 source 已经暂停,不需要在管理队列 rearm return ds->do_targetq; } if (prevent_starvation && dr->du_wlh == DISPATCH_WLH_ANON) { return ds->do_targetq; } if (unlikely(!_dispatch_source_refs_resume(ds))) { goto unregister_event; } if (!prevent_starvation && _dispatch_wlh_should_poll_unote(dr)) { _dispatch_event_loop_drain(KEVENT_FLAG_IMMEDIATE); } } return retq; }还有一些其他的方法,这里就不介绍了。有兴趣的可以看源码,太多了。
5. Dispatch I/O
我们可以使用 Dispatch I/O 快速读取一些文件,例如这样 :
- (void)readFile {
NSString *filePath = @"/.../青花瓷.m";
dispatch_queue_t queue = dispatch_queue_create("com.bool.readfile", DISPATCH_QUEUE_SERIAL);
dispatch_fd_t fd = open(filePath.UTF8String, O_RDONLY,0);
dispatch_io_t fileChannel = dispatch_io_create(DISPATCH_IO_STREAM, fd, queue, ^(int error) {
close(fd);
});
NSMutableData *fileData = [NSMutableData new];
dispatch_io_set_low_water(fileChannel, SIZE_MAX);
dispatch_io_read(fileChannel, 0, SIZE_MAX, queue, ^(bool done, dispatch_data_t _Nullable data, int error) {
if (error == 0 && dispatch_data_get_size(data) > 0) {
[fileData appendData:(NSData *)data];
}
if (done) {
NSString *str = [[NSString alloc] initWithData:fileData encoding:NSUTF8StringEncoding];
NSLog(@"read file completed, string is :\n %@",str);
}
});
}
输出结果:
ConcurrencyTest[41479:5357296] read file completed, string is :
天青色等烟雨 而我在等你
月色被打捞起 晕开了结局
如果读取大文件,我们可以进行切片读取,将文件分割多个片,放在异步线程中并发执行,这样会比较快一些。
关于源码,简单看了一下,调度逻辑和之前的任务类似。然后读写操作,是调用的一些底层接口实现,这里就偷懒一下不详细说了。使用 Dispatch I/O,多数情况下是为了并发读取一个大文件,提高读取速度。
6. Other
上面已经讲了概览图中的大部分东西,还有一些未讲述,这里简单描述一下:
-
dispatch_object。GCD 用 C 函数实现的对象,不能通过集成 dispatch 类实现,也不能用 alloc 方法初始化。GCD 针对 dispatch_object 提供了一些接口,我们使用这些接口可以处理一些内存事件、取消和暂停操作、定义上下文和处理日志相关工作。dispatch_object 必须要手动管理内存,不遵循垃圾回收机制。
-
dispatch_time。在 GCD 中使用的时间对象,可以创建自定义时间,也可以使用
DISPATCH_TIME_NOW、DISPATCH_TIME_FOREVER这两个系统给出的时间。
以上为 GCD 相关知识,这次使用的源码版本为最新版本 —— 912.30.4.tar.gz,和之前看的版本代码差距很大,因为代码量的增加,新版本代码比较乱,不过基本原理还是差不多的。曾经我一度认为,最上面的是最新版本...
Operations
Operations 也是我们在并发编程中常用的一套 API,根据 官方文档 划分的结构如下图:
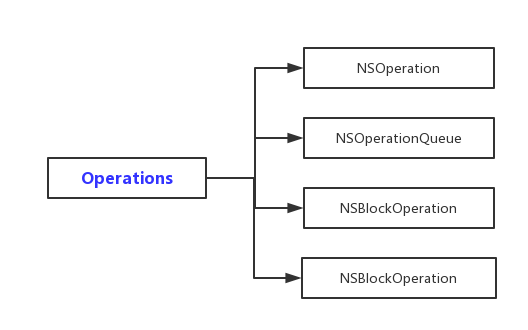
其中 NSBlockOperation 和 NSInvocationOperation 是基于 NSOperation 的子类化实现。相对于 GCD,Operations 的原理要稍微好理解一些,下面就将用法和原理介绍一下。
1. NSOperation
基本使用
每一个 operation 可以认为是一个 task。NSOperation 本事是一个抽象类,使用前需子类化。幸运的是,Apple 为我们实现了两个子类:NSInvocationOperation、NSBlockOperation。我们也可以自己去定义一个 operation。下面介绍一下基本使用:
-
创建一个
NSInvocationOperation对象并在当前线程执行.NSInvocationOperation *invocationOperation = [[NSInvocationOperation alloc] initWithTarget:self selector:@selector(log) object:nil]; [invocationOperation start]; -
创建一个
NSBlockOperation对象并执行 (每个 block 不一定会在当前线程,也不一定在同一线程执行).NSBlockOperation *blockOpeartion = [NSBlockOperation blockOperationWithBlock:^{ NSLog(@"block operation"); }]; // 可以添加多个 block [blockOpeartion addExecutionBlock:^{ NSLog(@"other block opeartion"); }]; [blockOpeartion start]; -
自定义一个 Operation。当我们不需要操作状态的时候,只需要实现
main()方法即可。需要操作状态的后面再说.@interface BLOpeartion : NSOperation @end @implementation BLOpeartion - (void)main { NSLog(@"BLOperation main method"); } @end - (void)viewDidLoad { [super viewDidLoad]; BLOperation *blOperation = [BLOperation new]; [blOperation start]; } -
每个 operation 之间设置依赖.
NSBlockOperation *blockOpeartion1 = [NSBlockOperation blockOperationWithBlock:^{ NSLog(@"block operation1"); }]; NSBlockOperation *blockOpeartion2 = [NSBlockOperation blockOperationWithBlock:^{ NSLog(@"block operation2"); }]; // 2 需要在 1 执行完之后再执行。 [blockOpeartion2 addDependency:blockOpeartion1]; -
与队列相关的使用,后面再说.
基本原理
NSOperation 内置了一个强大的状态机,一个 operation 从初始化到执行完毕这一生命周期,对应了各种状态。下面是在 WWDC 2015 Advanced NSOperations 出现的一张图:
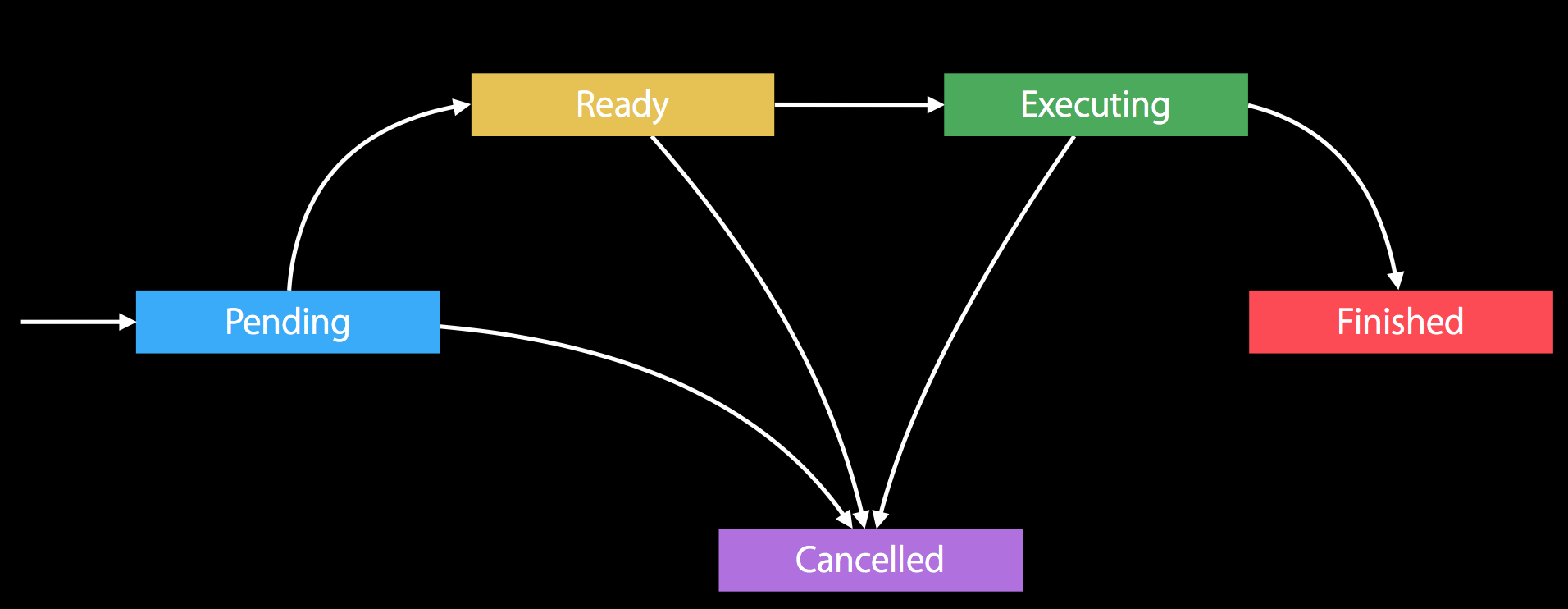
operation 一开始是 Pending 状态,代表即将进入 Ready;进入 Ready 之后,代表任务可以执行;然后进入 Executing 状态;最后执行完成,进入 Finished 状态。过程中,除了 Finished 状态,在其他几个状态中都可以进行 Cancelled。
NSOperation 并没有开源。但是 swift 开源了,在 swift 中它叫 Opeartion,我们可以在 这里 找到他的源码。我这里 copy 了一份:
open class Operation : NSObject {
let lock = NSLock()
internal weak var _queue: OperationQueue?
// 默认几个状态都是 false
internal var _cancelled = false
internal var _executing = false
internal var _finished = false
internal var _ready = false
// 用一个集合来保存依赖它的对象
internal var _dependencies = Set<Operation>()
// 初始化一些 dispatch_group 对象,来管理 operation 以及其依赖对象的 执行。
#if DEPLOYMENT_ENABLE_LIBDISPATCH
internal var _group = DispatchGroup()
internal var _depGroup = DispatchGroup()
internal var _groups = [DispatchGroup]()
#endif
public override init() {
super.init()
#if DEPLOYMENT_ENABLE_LIBDISPATCH
_group.enter()
#endif
}
internal func _leaveGroups() {
// assumes lock is taken
#if DEPLOYMENT_ENABLE_LIBDISPATCH
_groups.forEach() { $0.leave() }
_groups.removeAll()
_group.leave()
#endif
}
// 默认实现的 start 方法中,执行 main 方法,线程安全,下同。执行前后设置 _executing。
open func start() {
if !isCancelled {
lock.lock()
_executing = true
lock.unlock()
main()
lock.lock()
_executing = false
lock.unlock()
}
finish()
}
// 默认实现的 finish 方法中,标记 _finished 状态。
internal func finish() {
lock.lock()
_finished = true
_leaveGroups()
lock.unlock()
if let queue = _queue {
queue._operationFinished(self)
}
...
}
// main 方法默认空,需要子类去实现。
open func main() { }
// 调用 cancel 方法后,只是标记状态,具体操作在 main 中,调用 cancel 后也被认为是 finish。
open func cancel() {
lock.lock()
_cancelled = true
lock.unlock()
}
/** 几个状态的 get 方法,省略 */
...
// 是否为异步任务,默认为 false。这个方法在 OC 中永远不会去实现
open var isAsynchronous: Bool {
return false
}
// 设置依赖,即将 operation 放到集合中
open func addDependency(_ op: Operation) {
lock.lock()
_dependencies.insert(op)
op.lock.lock()
#if DEPLOYMENT_ENABLE_LIBDISPATCH
_depGroup.enter()
op._groups.append(_depGroup)
#endif
op.lock.unlock()
lock.unlock()
}
...
// 默认队列优先级为 normal
open var queuePriority: QueuePriority = .normal
public var completionBlock: (() -> Void)?
open func waitUntilFinished() {
#if DEPLOYMENT_ENABLE_LIBDISPATCH
_group.wait()
#endif
}
// 线程优先级
open var threadPriority: Double = 0.5
/// - Note: Quality of service is not directly supported here since there are not qos class promotions available outside of darwin targets.
open var qualityOfService: QualityOfService = .default
open var name: String?
internal func _waitUntilReady() {
#if DEPLOYMENT_ENABLE_LIBDISPATCH
_depGroup.wait()
#endif
_ready = true
}
}
代码很简单,具体过程可以直接看注释,就不另说了。除此之外,我们可以看出,Operation 总很多方法造作都加了锁,说明这个类是线程安全的,当我们对 NSOperation 进行子类化时,重写方法要注意线程暗转问题。
2. NSOperationQueue
NSOperation 的很多花式操作,都是结合着 NSOperationQueue 进行的。我们在使用的时候,也是两者结合着使用。下面对其进行详细分析。
基本用法
- operation 放到 queue 中不用在手动调用
start方法去执行,operation 会自动执行。 - queue 可以设置最大并发数,当并发数量设置为 1 时,为串行队列;默认并发数量为无限大。
- queue 可以通过设置
suspended属性来暂停或者启动还未执行的 operation。 - queue 可以通过调用
-[cancelAllOperations]方法来取消队列中的任务。 - queue 可以通过
mainQueue方法来回到主队列(主线程);可以通过currentQueue方法来获取当前队列。 - 更多方法,请参考 官方文档
使用例子:
- (void)testOperationQueue {
NSOperationQueue *operationQueue = [NSOperationQueue new];
// 设置最大并发数量为 3
[operationQueue setMaxConcurrentOperationCount:3];
NSInvocationOperation *invocationOpeartion = [[NSInvocationOperation alloc] initWithTarget:self selector:@selector(log) object:nil];
[operationQueue addOperation:invocationOpeartion];
[operationQueue addOperationWithBlock:^{
NSLog(@"block operation");
// 回到主线程执行任务
[[NSOperationQueue mainQueue] addOperationWithBlock:^{
NSLog(@"execute in main thread");
}];
}];
// 暂停还未开始执行的任务
operationQueue.suspended = YES;
// 取消所有任务
[operationQueue cancelAllOperations];
}
有一个问题要特别说明一下:
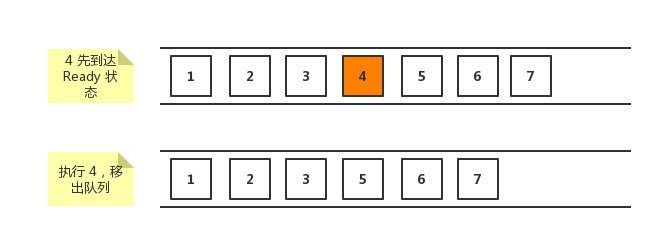
NSOperationQueue 和 GCD 中的队列不同。GCD 中的队列是遵循 FIFO 原则,先加入队列的先执行;NSOperationQueue 中的任务,根据谁先进入到 Ready 状态,谁先执行。如果有多个任务同时达到 Ready 状态,那么根据优先级来执行。
例如下面的任务中,4 先到达了 Ready 状态,4 先执行。并不是按照 1,2,3... 顺序执行。
基本原理
我们依然是在 swift 中找到相关源码,然后来进行分析:
// 默认最大并发数量为 int 最大值
public extension OperationQueue {
public static let defaultMaxConcurrentOperationCount: Int = Int.max
}
// 使用一个 list 来保存各个优先级的 operation。调用其中的方法对 operation 进行增删等操作。
internal struct _OperationList {
var veryLow = [Operation]()
var low = [Operation]()
var normal = [Operation]()
var high = [Operation]()
var veryHigh = [Operation]()
var all = [Operation]()
mutating func insert(_ operation: Operation) { ... }
mutating func remove(_ operation: Operation) { ... }
mutating func dequeue() -> Operation? { ... }
var count: Int {
return all.count
}
func map<T>(_ transform: (Operation) throws -> T) rethrows -> [T] {
return try all.map(transform)
}
}
open class OperationQueue: NSObject {
...
// 使用一个信号量的来控制并发数量
var __concurrencyGate: DispatchSemaphore?
var __underlyingQueue: DispatchQueue? {
didSet {
let key = OperationQueue.OperationQueueKey
oldValue?.setSpecific(key: key, value: nil)
__underlyingQueue?.setSpecific(key: key, value: Unmanaged.passUnretained(self))
}
}
...
internal var _underlyingQueue: DispatchQueue {
lock.lock()
if let queue = __underlyingQueue {
lock.unlock()
return queue
} else {
...
// 信号量的值根据最大并发数量来确定。每当执行一个任务,wait 信号量减一,signal 信号量加一,当信号量为0时,一直等待,直接大于 0 才会正常执行。
if maxConcurrentOperationCount == 1 {
attr = []
__concurrencyGate = DispatchSemaphore(value: 1)
} else {
attr = .concurrent
if maxConcurrentOperationCount != OperationQueue.defaultMaxConcurrentOperationCount {
__concurrencyGate = DispatchSemaphore(value:maxConcurrentOperationCount)
}
}
let queue = DispatchQueue(label: effectiveName, attributes: attr)
if _suspended {
queue.suspend()
}
__underlyingQueue = queue
lock.unlock()
return queue
}
}
#endif
...
// 出队列,每个任务执行时拿出队列执行
internal func _dequeueOperation() -> Operation? {
lock.lock()
let op = _operations.dequeue()
lock.unlock()
return op
}
open func addOperation(_ op: Operation) {
addOperations([op], waitUntilFinished: false)
}
// 主要执行方法。先判断 operation 是否 ready,处于 ready 后判断是否 cancel。没有 cancel 则执行。
internal func _runOperation() {
if let op = _dequeueOperation() {
if !op.isCancelled {
op._waitUntilReady()
if !op.isCancelled {
op.start()
}
}
}
}
// 将任务加到队列中。如果不指定任务优先级,执行的还快一些。否则需要对不同优先级进行划分,然后执行
open func addOperations(_ ops: [Operation], waitUntilFinished wait: Bool) {
#if DEPLOYMENT_ENABLE_LIBDISPATCH
var waitGroup: DispatchGroup?
if wait {
waitGroup = DispatchGroup()
}
#endif
lock.lock()
// 将 operation 依依加入 list,根据优先级保存到不同数组中
ops.forEach { (operation: Operation) -> Void in
operation._queue = self
_operations.insert(operation)
}
lock.unlock()
// 遍历执行,使用了 diapatch group,控制 enter 和 leave
ops.forEach { (operation: Operation) -> Void in
#if DEPLOYMENT_ENABLE_LIBDISPATCH
if let group = waitGroup {
group.enter()
}
// 通过信号量来控制并发数量
let block = DispatchWorkItem(flags: .enforceQoS) { () -> Void in
if let sema = self._concurrencyGate {
sema.wait()
self._runOperation()
sema.signal()
} else {
self._runOperation()
}
if let group = waitGroup {
group.leave()
}
}
_underlyingQueue.async(group: queueGroup, execute: block)
#endif
}
#if DEPLOYMENT_ENABLE_LIBDISPATCH
if let group = waitGroup {
group.wait()
}
#endif
}
internal func _operationFinished(_ operation: Operation) { ... }
open func addOperation(_ block: @escaping () -> Swift.Void) { ... }
// 返回值不一定准确
open var operations: [Operation] { ... }
// 返回值不一定准确
open var operationCount: Int { ... }
open var maxConcurrentOperationCount: Int = OperationQueue.defaultMaxConcurrentOperationCount
// suppend 属性的 get & set 方法。默认不暂停
internal var _suspended = false
open var isSuspended: Bool { ... }
...
// operation 在获取系统资源时的优先级
open var qualityOfService: QualityOfService = .default
// 依次调用每个 operation 的 cancel 方法
open func cancelAllOperations() { ... }
open func waitUntilAllOperationsAreFinished() {
#if DEPLOYMENT_ENABLE_LIBDISPATCH
queueGroup.wait()
#endif
}
static let OperationQueueKey = DispatchSpecificKey<Unmanaged<OperationQueue>>()
// 通过使用 GCD 中的 getSpecific 方法获取当前队列
open class var current: OperationQueue? {
#if DEPLOYMENT_ENABLE_LIBDISPATCH
guard let specific = DispatchQueue.getSpecific(key: OperationQueue.OperationQueueKey) else {
if _CFIsMainThread() {
return OperationQueue.main
} else {
return nil
}
}
return specific.takeUnretainedValue()
#else
return nil
#endif
}
// 定义主队列,最大并发数量为 1,获取主队列时将这个值返回
private static let _main = OperationQueue(_queue: .main, maxConcurrentOperations: 1)
open class var main: OperationQueue { ... }
}
代码很长,但是简单,可以直接通过注释来理解了。这里屡一下:
- 将每个 operation 加入到队列时,会根据优先级将 operation 分类存入 list 中,根据优先级执行。如果都不设置优先级,执行起来比较快一些。
- 加入到队列,会遍历每个 operation,取出进入
Ready状态且没被Cancel的依次执行。 - 通过
concurrencyGate这个信号量来控制并发数量。每当执行一个任务,wait 信号量减一,signal 信号量加一,当信号量为0时,一直等待,直接大于 0 才会正常执行。 - 每个方法中基本都加了锁,来保证线程安全。
自定义 NSOperation
之前说了自定义普通的 NSOperation,只需要重写 main 方法就可以了,但是因为我们没有处理并发情况,线程执行结束操作,KVO 机制,所以这种普通的不建议用来做并发任务。下面讲一下如何自定义并行的 NSOperation。
必须要实现的一些方法:
start方法,在你想要执行的线程中调用此方法。不需要调用 super 方法。main方法,在start方法中调用,任务主体。isExecuting方法,是否正在执行,要实现 KVO 机制。isConcurrent方法,已经弃用,由isAsynchronous来代替。isAsynchronous方法,在并发任务中,需要返回 YES。
@interface BLOperation ()
@property (nonatomic, assign) BOOL executing;
@property (nonatomic, assign) BOOL finished;
@end
@implementation BLOperation
@synthesize executing;
@synthesize finished;
- (instancetype)init {
self = [super init];
if (self) {
executing = NO;
finished = NO;
}
return self;
}
- (void)start {
if ([self isCancelled]) {
[self willChangeValueForKey:@"isFinished"];
finished = YES;
[self didChangeValueForKey:@"isFinished"];
return;
}
[self willChangeValueForKey:@"isExecuting"];
[NSThread detachNewThreadSelector:@selector(main) toTarget:self withObject:nil];
executing = YES;
[self didChangeValueForKey:@"isExecuting"];
}
- (void)main {
NSLog(@"main begin");
@try {
@autoreleasepool {
NSLog(@"custom operation");
NSLog(@"currentThread = %@", [NSThread currentThread]);
NSLog(@"mainThread = %@", [NSThread mainThread]);
[self willChangeValueForKey:@"isFinished"];
[self willChangeValueForKey:@"isExecuting"];
executing = NO;
finished = YES;
[self didChangeValueForKey:@"isExecuting"];
[self didChangeValueForKey:@"isFinished"];
}
} @catch (NSException *exception) {
NSLog(@"exception is %@", exception);
}
NSLog(@"main end");
}
- (BOOL)isExecuting {
return executing;
}
- (BOOL)isFinished {
return finished;
}
- (BOOL)isAsynchronous {
return YES;
}
@end
关于 NSBlockOpeartion,主要实现了 main 方法,然后用一个数组保存加进来的其他 block,源码如下:
open class BlockOperation: Operation {
typealias ExecutionBlock = () -> Void
internal var _block: () -> Void
internal var _executionBlocks = [ExecutionBlock]()
public init(block: @escaping () -> Void) {
_block = block
}
override open func main() {
lock.lock()
let block = _block
let executionBlocks = _executionBlocks
lock.unlock()
block()
executionBlocks.forEach { $0() }
}
open func addExecutionBlock(_ block: @escaping () -> Void) {
lock.lock()
_executionBlocks.append(block)
lock.unlock()
}
open var executionBlocks: [() -> Void] {
lock.lock()
let blocks = _executionBlocks
lock.unlock()
return blocks
}
}
关于 NSOperation 的相关东西,到此结束。
在开发中的一些问题
相对于 API 的使用和基本原理的了解,我认为最重要的还是这一部分。毕竟我们还是要拿这些东西来开发的。并发编程中有很多坑,这里简单介绍一些。
1. NSNotification 与多线程问题
我们都知道,NSNotification 在哪个线程 post,最终就会在哪个线程执行。如果我们不是在主线程 post 的,但是却在主线程接收的,而且我们期望 selector 在主线程执行。这时候我们需要注意下,在 selector 需要 dispatch 到主线程才可以。当然你也可以使用 addObserverForName:object:queue:usingBlock: 来指定执行 block 的 queue。
@implementation BLPostNotification
- (void)postNotification {
dispatch_queue_t queue = dispatch_queue_create("com.bool.post.notification", DISPATCH_QUEUE_SERIAL);
dispatch_async(queue, ^{
// 从非主线程发送通知 (通知名字最好定义成一个常量)
[[NSNotificationCenter defaultCenter] postNotificationName:@"downloadImage" object:nil];
});
}
@end
@implementation ImageViewController
- (void)viewDidLoad {
[super viewDidLoad];
[[NSNotificationCenter defaultCenter] addObserver:self selector:@selector(show) name:@"downloadImage" object:nil];
}
- (void)showImage {
// 需要 dispatch 到主线程更新 UI
dispatch_async(dispatch_get_main_queue(), ^{
// update UI
});
}
@end
2. NSTimer 与多线程问题
使用 NSTimer 时,在哪个线程生成的 timer,就在哪个线程销毁,否则会有意想不到的结果。官方这样描述的:
However, for a repeating timer, you must invalidate the timer object yourself by calling its invalidate method. Calling this method requests the removal of the timer from the current run loop; as a result, you should always call the invalidate method from the same thread on which the timer was installed.
@interface BLTimerTest ()
@property (nonatomic, strong) dispatch_queue_t queue;
@property (nonatomic, strong) NSTimer *timer;
@end
@implementation BLTimerTest
- (instancetype)init {
self = [super init];
if (self) {
_queue = dispatch_queue_create("com.bool.timer.test", DISPATCH_QUEUE_SERIAL);
}
return self;
}
- (void)installTimer {
dispatch_async(self.queue, ^{
self.timer = [NSTimer scheduledTimerWithTimeInterval:3.0f repeats:YES block:^(NSTimer * _Nonnull timer) {
NSLog(@"test timer");
}];
});
}
- (void)clearTimer {
dispatch_async(self.queue, ^{
if ([self.timer isValid]) {
[self.timer invalidate];
self.timer = nil;
}
});
}
@end
3. Dispatch Once 死锁问题
在开发中,我们经常使用 dispatch_once,但是递归调用会造成死锁。例如下面这样:
- (void)dispatchOnceTest {
static dispatch_once_t onceToken;
dispatch_once(&onceToken, ^{
[self dispatchOnceTest];
});
}
至于为什么会死锁,上文介绍 Dispatch Once 的时候已经说明了,这里就不多做介绍了。提醒一下使用的时候要注意,不要造成递归调用。
4. Dispatch Group 问题
在使用 dispatch_group 的时候,dispatch_group_enter(taskGroup) 和 dispatch_group_leave(taskGroup) 一定要成对,否则也会出现崩溃。大多数情况下我们都会注意,但是有时候可能会疏忽。例如多层 for loop 时 :
- (void)testDispatchGroup {
NSString *path = @"";
NSFileManager *fileManager = [NSFileManager defaultManager];
NSArray *folderList = [fileManager contentsOfDirectoryAtPath:path error:nil];
dispatch_group_t taskGroup = dispatch_group_create();
for (NSString *folderName in folderList) {
dispatch_group_enter(taskGroup);
NSString *folderPath = [@"path" stringByAppendingPathComponent:folderName];
NSArray *fileList = [fileManager contentsOfDirectoryAtPath:folderPath error:nil];
for (NSString *fileName in fileList) {
dispatch_async(_queue, ^{
// 异步任务
dispatch_group_leave(taskGroup);
});
}
}
}
上面的 dispatch_group_enter(taskGroup) 在第一层 for loop 中,而 dispatch_group_leave(taskGroup) 在第二层 for loop 中,两者的关系是一对多,很容造成崩溃。有时候嵌套层级太多,很容易忽略这个问题。
总结
关于 iOS 并发编程,就总结到这里。后面如果有一些 best practices 我会更新进来。另外,因为文章比较长,可能会出现一个错误,欢迎指正,我会对此加以修改。
