

HashMap分析: www.begincode.net/blog/55
先看一段代码
public class Main {
private static ExecutorService executorService = Executors.newFixedThreadPool(10);
public static final int threadCount = 10000;
public static void main(String[] args) {
List<Callable<Integer>> monitorList = new ArrayList<Callable<Integer>>();
final HashMap map = new HashMap();
for(int i =0;i<threadCount;i++){
monitorList.add(new Callable<Integer>() {
public Integer call() throws Exception {
map.put(UUID.randomUUID().toString(), "11");
return 1;
}
});
}
try {
List<Future<Integer>> futures = executorService.invokeAll(monitorList);
System.out.println("线程大小"+futures.size());
} catch (InterruptedException e) {
e.printStackTrace();
}
}
}
代码的大意就是在main函数中开启10000个线程,使用UUID生成的唯一标识作为key,不断的存入进map,模拟了高并发的put操作。运行后。。。  发现内存满了(我电脑是12G的内存),这是为什么呢。因为HashMap在并发执行put操作时引起了死循环,会导致HashMap的Entry链形成环形的
数据结构,一旦形成环形的后,Entry的next节点永远不为空,所以就产生了死循环. 这就是所谓的线程不安全。
发现内存满了(我电脑是12G的内存),这是为什么呢。因为HashMap在并发执行put操作时引起了死循环,会导致HashMap的Entry链形成环形的
数据结构,一旦形成环形的后,Entry的next节点永远不为空,所以就产生了死循环. 这就是所谓的线程不安全。
学习HashMap的时候,肯定也学过Hashtable这个类,大致的就记得Hashtable是线程安全的,在并发使用这个类中的方法时能保证数据不被其他线程所改变。
再仔细一点的同学就会点进去看源码了,发现大部分的方法都是用synchronized关键字修饰。不过synchronized关键字的性能还是不够好,当有一个线程正在使用时,就会锁住整个hash表,其他的线程就只能乖乖的等待了。
从jdk1.5开始 就出现了ConcurrentHashMap,这个类与Hashtable区别就是 锁的粒度和锁的方式
正文
ConcurrentHashMap为什么高效?
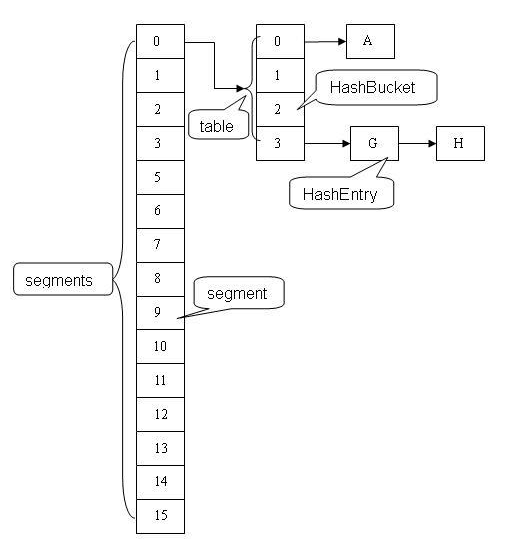
与Hashtable不同的是,ConcurrentHashMap使用的是分段锁技术,将ConcurrentHashMap容器的数据分段存储,每一段数据分配一个Segment,当线程占用一个Segment时,其他线程可以访问其他段的数据.
概念
Segment : 可重入锁,继承ReentrantLock 也称之为桶
HashEntry : 主要存储键值对 可以叫节点
HashEntry源码:
static final class HashEntry<K,V> {
final int hash;
final K key;
volatile V value;
volatile HashEntry<K,V> next;volatile关键字保证了多线程读取的时候一定是最新值。
ConcurrentHashMap包含一个Segment数组,每个Segment包含一个HashEntry数组,当修改HashEntry数组采用开链法处理冲突,所以它的每个HashEntry元素又是链表结构的元素。
基本操作源码分析
构造方法:
public ConcurrentHashMap(int initialCapacity,
float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS; //1
int sshift = 0;
int ssize = 1;
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1; //2
}
this.segmentShift = 32 - sshift; //3
this.segmentMask = ssize - 1; //4
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
int c = initialCapacity / ssize;
if (c * ssize < initialCapacity)
++c;
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
Segment<K,V> s0 =
new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);//5
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize]; //6
UNSAFE.putOrderedObject(ss, SBASE, s0);
this.segments = ss;
}整个初始化是通过参数initialCapacity(初始容量),loadFactor(增长因子)和concurrencyLevel(并发等级)来初始化segmentShift(段偏移量)、segmentMask(段掩码)和segment数组。
注释1: 最大的并发等级不能超过MAX_SEGMENTS 1<<16(也就是1的二进制向左移16位,65535)
注释2: 如果你传入的是15 就是向上取2的4次方倍 也就是16.
注释3和4: segmentShift和segmentMask在定位segment使用,segmentShift = 32 - ssize向左移位的次数,segmentMask = ssize - 1。ssize的最大长度是65536,对应的 segmentShift最大值为16,segmentMask最大值是65535,对应的二进制16位全为1;
注释5和6: 初始化segment
1.初始化每个segment的HashEntry长度;
2.创建segment数组和segment[0]。
HashEntry长度cap同样也是2的N次方,默认情况,ssize = 16,initialCapacity = 16,loadFactor = 0.75f,那么cap = 1,threshold = (int) cap * loadFactor = 0。
get操作
public V get(Object key) {
Segment<K,V> s;
HashEntry<K,V>[] tab;
int h = hash(key); //1
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null && //2
(tab = s.table) != null) {
for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile
(tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next) {
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
}
}
return null;
}注释1: 根据key计算hash值
注释2: 根据计算出的hash值定位segment 如果segment不为null segment.table也不为null 跳转进里面的循环
里面的一大段东西 大致讲的就是通过hash值定位segment中对应的HashEntry 遍历HashEntry,如果key存在,返回key对应的value 如果不存在则返回null
put操作
public V put(K key, V value) {
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
int hash = hash(key);
int j = (hash >>> segmentShift) & segmentMask;
if ((s = (Segment<K,V>)UNSAFE.getObject
(segments, (j << SSHIFT) + SBASE)) == null)
s = ensureSegment(j);
return s.put(key, hash, value, false);
}1.判断值是否为null
2.计算hash值
3.定位segment 如果不存在,则创建
4.调用segment的put方法
还有一个putifAbsent的方法 ,唯一的不同就是最后的false变为了true
再来看看Segment的put方法
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
HashEntry<K,V> node = tryLock() ? null :
scanAndLockForPut(key, hash, value); //1
V oldValue;
try {
HashEntry<K,V>[] tab = table;
int index = (tab.length - 1) & hash;
HashEntry<K,V> first = entryAt(tab, index); //2
for (HashEntry<K,V> e = first;;) { //3
if (e != null) {
K k;
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value;
++modCount;
}
break;
}
e = e.next;
}
else {
if (node != null)
node.setNext(first);
else
node = new HashEntry<K,V>(hash, key, value, first);
int c = count + 1;
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
rehash(node);
else
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
unlock();
}
return oldValue;
}注释1: 获取锁 ,保证线程安全
注释2:定位到具体的HashEntry
注释3: 遍历HashEntry链表,如果key已存在 再判断传入的onlyIfAbsent的值 ,再决定是否覆盖旧值.
最后释放锁,返回旧值.
再说明一下put 和 putifAbsent的用法
这两个方法本身是线程安全的,但是要看你的用法是否恰当
例子:
private static ConcurrentHashMap<String,AtomicInteger> map = new ConcurrentHashMap<>(); public static void putInTo(String key) { AtomicInteger obj = map.get(key); if(obj == null){ map.put(key, new AtomicInteger(0)); }else{ obj.incrementAndGet(); map.put(key, obj); } }这段代码可以用最开始提供的测试代码进行测试,会发现如果多个线程调用putInTo方法 最后值会确定不了,每一次都是不一样。 就算是保证原子性的AtomicInteger 也会有误差,可能误差比较小罢了。这个误差的出现就会出现在前几次的操作。
原因: 多个线程同时进入putInTo 比如线程1已经把不存在的键值对存入,而线程2还没完成操作 再继续存入key相同的键值对,从而覆盖了前面存入的数据,导致数据丢失。
这段代码就能保证线程安全 而不用通过synchronized关键字来锁定方法
private static ConcurrentMap<String, AtomicLong> wordCounts = newConcurrentHashMap<>(); public static long increase(String word) { AtomicLong number = wordCounts.get(word); if(number == null) { AtomicLong newNumber = newAtomicLong(0); number = wordCounts.putIfAbsent(word, newNumber); if(number == null) { number = newNumber; } } return number.incrementAndGet(); }
获取size
public int size() {
final Segment<K,V>[] segments = this.segments;
int size;
boolean overflow;
long sum;
long last = 0L;
int retries = -1;
try {
for (;;) {
if (retries++ == RETRIES_BEFORE_LOCK) { //1
for (int j = 0; j < segments.length; ++j)
ensureSegment(j).lock();
}
sum = 0L;
size = 0;
overflow = false;
for (int j = 0; j < segments.length; ++j) {
Segment<K,V> seg = segmentAt(segments, j);
if (seg != null) {
sum += seg.modCount; //2
int c = seg.count;
if (c < 0 || (size += c) < 0)
overflow = true;
}
}
if (sum == last)
break;
last = sum;
}
} finally {
if (retries > RETRIES_BEFORE_LOCK) {
for (int j = 0; j < segments.length; ++j)
segmentAt(segments, j).unlock();
}
}
return overflow ? Integer.MAX_VALUE : size;
}注释1 : RETRIES_BEFORE_LOCK为不变常量2 尝试两次不锁住Segment的方式来统计每个Segment的大小,如果在统计的过程中Segment的count发生变化,这时候再加锁统计Segment的count
这段代码的上一句for(;;)会比while(true)效率高一点,因为这个容器的使用场景是高并发,所以代码还是越优越好。
总结
关于size 再引用一个我觉得很好的例子:
一个Map有4个Segment,标记为S1,S2,S3,S4,现在我们要获取Map的size。计算过程 是这样的:第一次计算,不对S1,S2,S3,S4加锁,遍历所有的Segment,假设每个Seg ment的大小分别为1,2,3,4,更新操作次数分别为:2,2,3,1,则这次计算可以得 到Map的总大小为1+2+3+4=10,总共更新操作次数为2+2+3+1=8;第二次计算,不对S1,S 2,S3,S4加锁,遍历所有Segment,假设这次每个Segment的大小变成了2,2,3,4,更 新次数分别为3,2,3,1,因为两次计算得到的Map更新次数不一致(第一次是8,第二 次是9)则可以断定这段时间Map数据被更新,则此时应该再试一次;第三次计算,不对S 1,S2,S3,S4加锁,遍历所有Segment,假设每个Segment的更新操作次数还是为3,2 ,3,1,则因为第二次计算和第三次计算得到的Map的更新操作的次数是一致的,就能 说明第二次计算和第三次计算这段时间内Map数据没有被更新,此时可以直接返回第三 次计算得到的Map的大小。最坏的情况:第三次计算得到的数据更新次数和第二次也不 一样,则只能先对所有Segment加锁再计算最后解锁。
- ConcurrentHashMap中的key和value值都不能为null,HashMap中key可以为null,HashTable中key不能为null。
- ConcurrentHashMap是线程安全的类并不能保证使用了ConcurrentHashMap的操作都是线程安全的!
- ConcurrentHashMap的get操作不需要加锁,put操作需要加锁 put和get都只关心一个segment
- 里面的hash操作质量也是很高的 如果hash后都存放在同一个segment中 那么使用这个类的意义就不会很大.
Reference:
- my.oschina.net/hosee/blog/…
- www.jianshu.com/p/9c713de7b…
- 《java并发编程实战》
